本文敘述三相永磁無刷直流(BLDC)馬達的工作原理,並介紹兩種換向方法在複雜性、力矩波動和效率方面的特點、優點和缺點;同時提出一種創新的BLDC換向方法,以及馬達控制器IC在三種換向方法的作用。
與傳統的有刷直流馬達的機械自換向不同,三相永磁無刷直流(Brushless DC ;BLDC)馬達控制需要一個電子換向電路。本文簡要回顧BLDC馬達的工作原理,並介紹兩種最廣泛使用的換向方法在複雜性、力矩波動和效率方面的特點、優點和缺點;然後提出一種創新的BLDC換向方法,並探討安森美(onsemi)的新款馬達控制器積體電路(IC)的特性和優點,該IC可適用於三種換向方法。
BLDC結構
BLDC馬達是一種旋轉式的馬達,由定子上的三相電樞繞組和轉子上的永磁體組成。BLDC馬達的機械結構與傳統的永磁有刷直流馬達相反,其轉子上裝有永磁體,定子上裝有馬達繞組。
然而,正如其名,BLDC馬達沒有電刷,無需定期維護或更換,因而不易受到磨損。BLDC轉子上的永磁體提供一個恆定的磁場,使其成為高效率、高力矩、低轉動慣量的馬達。BLDC的可靠性和變速驅動能力使其在眾多應用中很受歡迎,包括白家電、暖通空調(HVAC)、汽車和工業機械,以及機器人。
三相BLDC馬達的換向電路通常用分立元件或MCU和整合的功率模組實現。使用分立元件的設計需要大量的設計專業知識和經驗來構建和排除故障,需要一定的時間來實施。採用分立功率級的專用馬達控制IC已成為一種更受歡迎的方法,因為幾乎不需要額外的電路,而且許多製造商為其產品提供專用的配套軟體,這大大簡化了設置和調試。一個完全分立的解決方案通常可以將解決方案的元件成本降到最低。
而一個更加整合的解決方案可以通過減少PCB面積和製造步驟來降低整體系統成本—最少化物料清單(BOM)元件,降低庫存成本,並促進在新設計中快速重用迭代—並提高整體解決方案的可靠性。目前安森美已提供一款帶有分立功率級的專用控制IC。
BLDC控制
與典型的有刷直流馬達不同,BLDC馬達控制系統被稱為逆變器。它包括一個驅動馬達的功率級、用於感測無感測器工作的反電勢訊號檢測放大器、用於有感測器工作的編碼器或霍爾感測器,以及一個基於MCU的控制器。
控制器將速度和位置的回饋資訊轉換為適當的PWM訊號,以實現對馬達的動態控制。逆變器系統有許多優勢,可以抵消其在成本和複雜性方面的缺點:更高可靠性和能效,更少雜訊,更寬的工作範圍以及對速度和力矩的出色控制。要設計BLDC無刷直流逆變系統,還需要具備電子設計、布板和韌體編程方面的專業知識,並有完成這些工作的工具和資源。
梯形控制和磁場導向控制(FOC,又稱為向量控制),是在BLDC系統中廣泛使用的兩種換向演算法。梯形換向是最簡單的,但卻是效率最低、雜訊最大的方法。FOC實現起來更複雜,但通常更安靜、更高效。這兩種方法都可以採用有感測器或無感測器的工作方式。
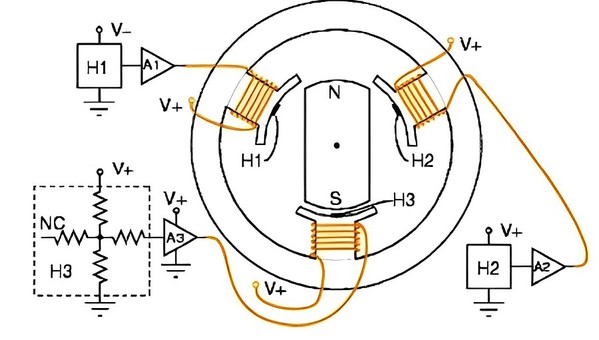
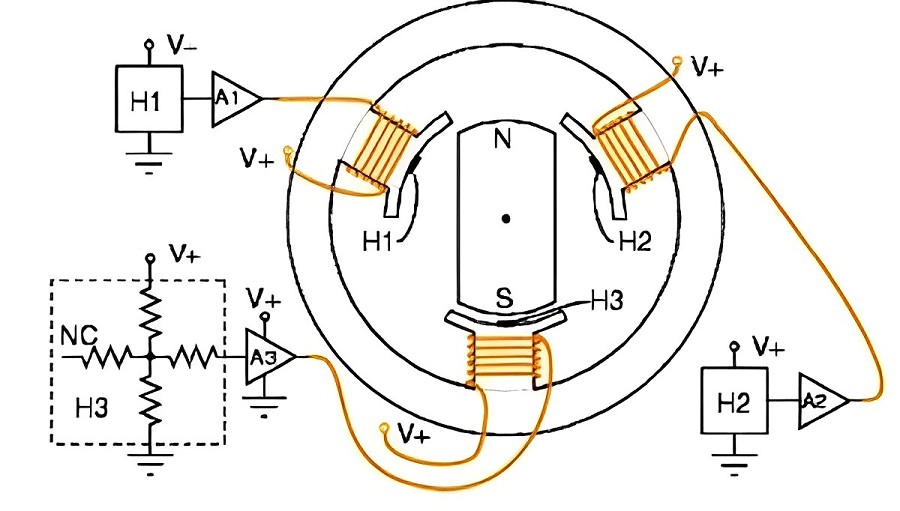
| 圖1 : BLDC體現霍爾感測器位置(source:Onsemi) |
|
梯形換向
梯形換向在每個馬達相上使用兩個功率開關元件,它們遵循預先確定的「開-關」順序。這種方法很受歡迎,因為控制演算法很簡單,而且能夠基於最基礎的MCU實現。梯形控制在控制馬達速度方面非常有效,但卻是效率最低的方法。儘管如此,它在換向過程中仍受高力矩波動影響,特別是在低速時,梯形換向在需要簡單閉環工作的低端應用中很受歡迎。
由於非線性因素,產生了巨大的力矩波動,而且在任何特定時間,三個馬達繞組中只有兩個有電流流過。結果,非線性因素產生了雜訊和振動,而且由於電流控制器必須足夠慢,不能對電流從相位到相位的傳輸瞬態做出回應,因此限制了整體性能。180°換向方法可以通過梯形換向產生高力矩,但120°換向可最小化力矩波動。開關順序的確定是為了在馬達旋轉時進行兩個連續的馬達相位(間隔為60°)。
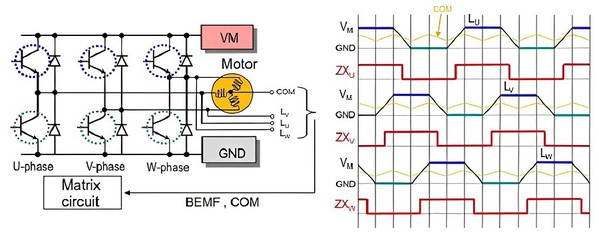
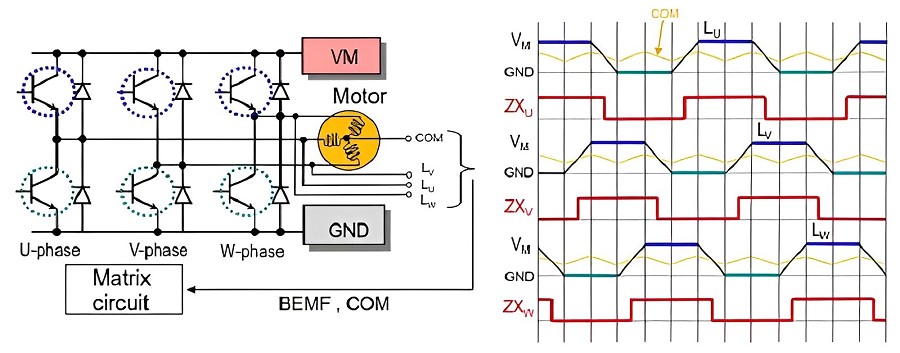
| 圖2 : 6步梯形控制波形(source:Onsemi) |
|
磁場導向控制
FOC是一種更複雜的換向方法,具有更高的處理要求,更適合於高端應用。與梯形換向相比,FOC的優點包括精確定位、更高的速度、更低的力矩波動和更低的雜訊,以及更高的電源效率。使用FOC換向方法,馬達可以基於馬達電流回饋去計算電壓和電流向量,從而實現無感測器換向,但如果應用需要,也可以利用霍爾效應感測器。
FOC可以在寬廣的工作電壓範圍內保持高效率,能夠對速度和力矩進行精確的動態控制。在FOC中,三個定子電流代表一個由正交力矩和磁通分量組成的向量。克拉克和帕克的數學變換將不同時間的交流電流和電壓波形轉換為直流值,大大簡化了下游的處理要求。FOC的主要缺點是需要增加處理能力,這可能需要一個更強大的MCU。
直接力矩和磁通量控制
雖然DTC和DTFC已經存在了一段時間,但Theta Power Solutions, Intl (TPSI)開發了一種新的無感測器BLDC換向法,直接控制力矩和磁通量。雖然DTFC不是一個新概念,TPSI開發出了一種獨特的、更有效的方法,為BLDC馬達提供磁通弱化,以提高高速能力。
TPSI的無感測器解決方案是制動演算法的理想選擇,能夠提供高慣性負載的可控減速。它採用了高速數據匯流排,可以傳輸即時馬達回饋資訊,以提供每安培最大力矩(MTPA)的控制電流。它在所有負載條件下(甚至在飽和狀態下)都能確保馬達的高效率,並具有熱補償功能,讓馬達可以不間斷運行或在極端溫度下運行。
對於需要在非常低的速度下獲得精確力矩的應用,TPSI的無感測器解決方案可以很好地解決這一問題,由於不需要感測器,讓用戶可以降低系統成本。
TPSI的方案與傳統的DTC(和FOC)相比,其優勢包括但不限於:
- 能夠以極低的電流需求進行閉環啟動
- 在更大的速度範圍內具有卓越的穩定性
- 無感測器工作
- 高速遙測技術允許將馬達作為感測器使用
- 每安培的最大力矩
- 噪音最小化
- 易於擴展性能
- 出色的低速性能(~5Hz),無需感測器
- 在整個速度範圍內具有出色的力矩調節能力
- 用戶介面簡化了流程,讓馬達快速運行
TPSI的DTFC需要額外的處理能力來實現。ECS640A是基於Arm Cortex-M0+級MCU實現這一先進控制技術的產品。
控制選擇三合一
安森美ecoSpin系列可配置馬達控制器可選用上述三種控制方法中的任何一種。ECS640A是該系列的第一個元件,是一個系統級封裝(SiP)方案。它整合了Arm Cortex-M0+微控制器、檢測放大器、參考放大器、自舉二極體,以及為高電壓、高速運行而設計的高壓柵極驅動器,統合在10mmx13mm的QFN封裝中。它可以驅動工作電壓高達600V的MOSFET和IGBT(FAN73896),並有六個柵極驅動器輸出,可向外部功率器件提供350mA/650mA(典型值)的柵極電流。該器件包括GPIO霍爾感測器輸入,以支持所需的感測操作,並有三個獨立的低端源引腳,允許進行單一或多個分流測量。
小尺寸和高整合度使得該元件適合與分立功率元件一起使用,以最大限度地提高擴展性。它配有一個由閃存加載器、器件啟動和系統檔、外設驅動器(CMSIS-Driver樣式)組成的軟體開發套件(SDK),以及用於外設演示的示例代碼。安森美還與Theta Power Solutions, Inc.合作,為ECS640A提供DTFC固件,這使得在Arm Cortex-M0+處理器上實現最佳化的馬達性能。
易於使用的圖形用戶介面簡化了代碼開發,加快產品上市。這種整合的解決方案為所使用的特定馬達自動生成係數參數,使系統易於設置並且能夠快速運行,不會因旋轉馬達的細節疏漏而出錯。
靈活性和整合性
BLDC馬達在各種應用中越來越受歡迎,但需要適當的換向來充分發揮其優勢。在選擇BLDC馬達控制器IC時,選擇能提供最多換向選擇和高整合度的IC是有意義的。ECS640A馬達控制器提供靈活性和易用性,支持有感測器和無感測器應用。
(本文作者Joe Howell為安森美資深系統工程師)