在電腦上玩賽車遊戲時,玩家的視角通常是在汽車上方或後方,因而能夠看到汽車行駛的周遭環境。這樣的視角能夠幫助即時瞭解交通狀況,並獲得更好的駕駛體驗。遺憾的是,這樣的視角無法成為現實生活中的駕駛體驗;然而,汽車環景系統(又稱為「鳥瞰(birds eye view)」或「全景(around view)」)正逐漸地改變這樣的情況。
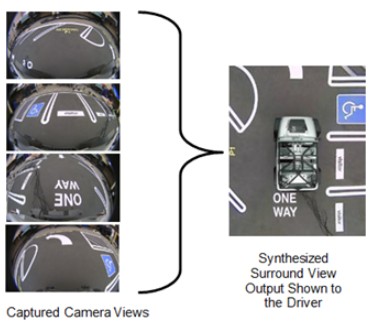
汽車環景是先進駕駛輔助系統(ADAS)技術的一種,能夠即時為駕駛者顯示汽車及其周圍環境的鳥瞰360度的全景影像,以確保在停車或其他低速行駛情況下的駕駛安全。在現實生活中,汽車的頂部沒有安裝攝影鏡頭,駕駛者所看到的鳥瞰全景影像,實際上是由4-6部安裝在車身周圍的魚眼攝影機合成的虛擬影像,如圖所示。
隨著現今越來越多汽車配備環景系統,我們從中觀察到了幾個關鍵趨勢。第一,視覺品質正逐漸提高。早期的環景系統採用的是低解析度攝影機,從未嘗試將其無縫接合在環景系統的應用上,且不同攝影機所拍攝的畫面在整合時,邊界都會用黑色條紋代替。而更先進的系統可以無縫接合影像視角,讓鳥瞰全景影像更加真實。如圖即為德州儀器(TI)TDA2x無縫接合環景系統的應用範例之一。無縫接合技術需要先進幾何和光學排比演算法,TI的數位訊號處理器(DSP)正能有效的滿足此類需求。透過環景系統中應用寬動態範圍(WDR)成像演算法,視覺品質還能進一步提高。
在駕駛汽車的過程中,我們經常遇到各種不同的情況,例如從車庫駛出的汽車,在不同的車身部位會出現顯著的亮度差異。在這種情況下,WDR成像能夠幫助創造一個環景影像輸出,讓黑暗和明亮的區域都能夠清晰可見。TI TDA3x系列處理器擁有WDR成像能力,可應用於環視系統。
視覺品質的另一項待改善問題是視覺雜訊干擾過濾。在夜間使用環景系統時,受到低亮度影響,攝影機輸出常出現很高程度的畫質干擾。運用先進視覺雜訊干擾過濾演算法能夠降低畫質干擾程度,同時改善環景影像的品質。TDA3x處理器即是一個理想的解決方案。
環景系統通常僅包含裝設在車身上方的鳥瞰攝影機影像,然透過添加額外的功能,攝影機視角可以動態地改變,駕駛者因此能夠從各個不同的角度觀察汽車與周圍環境,並選擇需要的視角。基於GPU的影像處理幫助實現了這樣的技術:TDA2x系統單晶片(SoC)具有SGX544圖形引擎,可用於實現擁有動態攝影視角的3D環景。
對於先進環景系統其他待改進的部份,例如提升汽車鄰近物體的繪圖影像。目前的環景系統在進行繪圖處理此類物體時還會對其進行延伸。在某些情況下,當這些物體靠近接合邊界時會產生重疊鬼影。更進階的演算法在今後將減少此類失真,讓輸出影像更加真實。
除了以上討論的視覺品質改進趨勢外,還有另一個有趣的發展,即在環景中添加智慧演算法,以檢測某些特定的事件發生,並緊急警告駕駛者。由於汽車周圍的行人和其他物體有可能引發碰撞,提供駕駛者汽車周邊資訊成為非常重要的環節。用於分析環景影像的視覺演算法能夠檢測這些物體,並在環景顯示螢幕上重複發出警告資訊,以確保駕駛者集中注意力。這些演算法還能夠讓額外的感測器(例如超音波)與環景攝影系統相互融合,以實現較高的穩固性。未來,我們甚至可以期望利用環景系統在低速行駛時實現自動駕駛。