NVIDIA在ROSCon 2022大會宣布推出最新Isaac ROS軟體 Developer Preview(DP)2版本,在該版本中加入用於自主移動機器人(AMR)機隊的雲端與邊緣機器人任務管理與監控全新功能,以及其他供ROS 2開發人員使用的功能。
 |
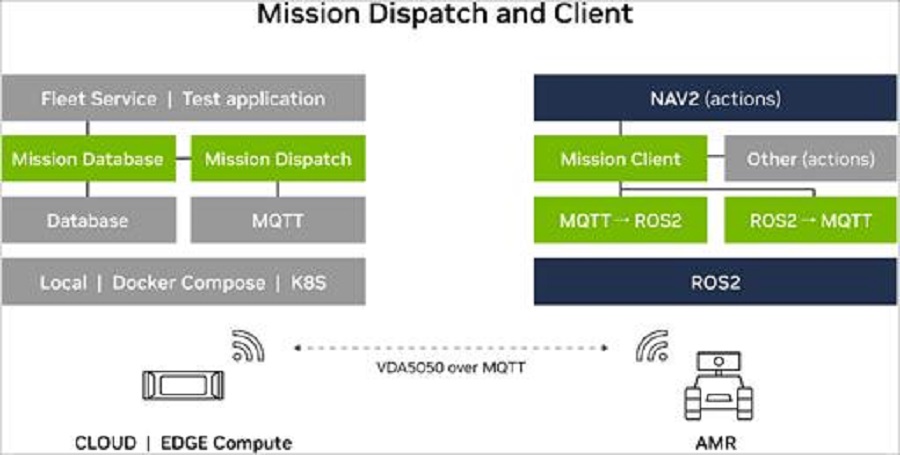
| Mission Dispatch與Mission Client軟體的架構 |
NVIDIA Isaac ROS內有單獨的套裝軟體(GEMs)與完整的作業流程(NITROS),以加速硬體效能。此外,新版本亦加入以下功能:
Mission Dispatch與Client:這個開放原始碼的CPU軟體包用於從機隊管理系統向機器人分配任務並進行監控。Mission Dispatch功能是一項雲端原生微服務,可以與更大規模的機隊管理系統結合。
FreeSpace Segmentation:此硬體加速包適用於在機器人附近產生一個基於視覺人工智慧(AI)的佔據網格(occupancy grid),作為導航堆疊的輸入項目。
H.264影像編碼與解碼:用於錄製和播放壓縮影像資料的硬體加速包。收集影像資料是訓練AI感知模型的重要環節。在NVIDIA Jetson AGX Orin平台上,使用兩個1080p解析度的立體攝影機,以30fps(總共>120fps)的畫面更新率測量這些新的GEM執行表現,資料佔用空間降低約十倍。
Mission Dispatch與Client提供標準的開放原始碼方式,分配與追蹤機隊管理系統及ROS 2機器人之間的任務。Dispatch與Client使用專為機器人機隊設計的開放通訊標準VDA5050進行溝通,並藉由用於物聯網(IoT)應用的羽量級訊息傳輸協定MQTT以無線方式傳遞。
Mission Dispatch是一個容器化的微服務,可從NGC下載,或是當成Isaac GitHub上的原始程式碼,並且可與機隊管理系統整合。Mission Dispatch已通過驗證,可以和其他開放原始碼ROS 2用戶端互通,像是日前宣布由OTTO Motors和InOrbit共同開發的VDA5050 Connector。
Mission Client相容於ROS 2 Humble,在Isaac ROS GitHub中作為一個軟體包並與Nav2導航堆疊預先進行整合,以分配及追蹤機器人上的導航和其他任務。
OTTO Motors技術長Ryan Gariepy表示:「隨著現實環境中移動機器人加速部署,互通性的重要程度日益提升。將VDA5050與ROS2串連成一個開放原始碼社群,將促進機隊管理解決方案創新,並讓機器人製造商能夠著重在差異化發展。」
NVIDIA Isaac ROS不斷為ROS 2開發人員社群提供硬體加速效能,用於AI感知、影像處理與導航。自主機器人須具備先進的AI和電腦視覺功能,Isaac ROS代表著NVIDIA的承諾,我們將讓機器人社群的開發人員更容易採用這些頂尖技術。