猫咪磨??人类的行为,被认为对人类具有疗愈效果。一项发表於《ACM 人机互动学报》的研究中,研究人员开发出一款模仿这种磨??行为的机器人,并进行实验评估其对人类叁与者的影响。
 |
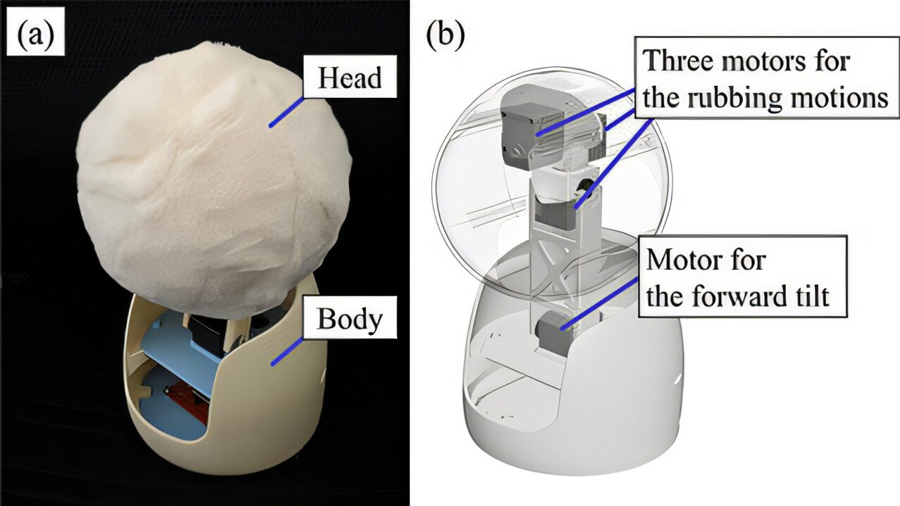
| 此研究的首个原型机: (a) 外观; (b) 内部配置。 |
为了模仿猫咪磨??的动作,机器人的颈部(颈椎)必须具有弹性,并能够在运动过程中调整其刚性。研究团队开发了一种具有可变刚度机制的机器人,可以透过钢丝张力调整颈部刚度。
该机器人透过 22 名大学生叁与的实验进行测试,每个实验持续 40 秒的磨??动作,并设置了三种颈部刚度:1)低、2)高和 3)可变。
叁与者使用临时情绪量表问卷评估磨??动作,该问卷用於衡量他们的情绪变化。结果显示,与使用机器人之前相比,叁与者在与机器人互动後,紧张程度显着降低。
尽管在可变刚度设置下观察到最大的紧张度降低,但在三种设置之间没有发现统计学上的显着差异。然而,一些叁与者评论了可变刚度设置的有效性,表明其具有潜在的益处。
这些发现将有助於开发能够与人类互动的机器人,提供疗愈效果并促进福祉。