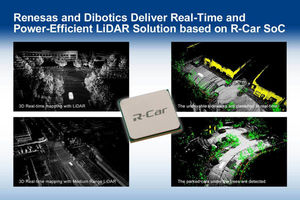
瑞萨电子与即时3D光达(LiDAR ; Light Detection And Ranging)处理领域的厂商Dibotics日前宣布,共同开发可使用於先进驾驶辅助系统(ADAS)和自动驾驶应用的汽车等级嵌入式光达处理解决方案。双方所合作开发的解决方案,将让系统制造商能够开发出具有高等级功能安全(FuSa)以及低功耗特点的即时3D映射(3D mapping)系统。
 |
| 开放式光达解决方案扩展了瑞萨的「Renesas autonomy」平台,相关展示将於CES 2018在Dibotics摊位中展出(中央广场北厅,C-5,法国汽车馆) |
现今光达处理的实现,需要结合高效能的处理平台和先进的嵌入式软体。藉由结合瑞萨具高性能影像处理能力及低功耗特点的车用R-Car SoC,与Dibotics的3D SLAM(Simultaneous Localization And Mapping,同时定位与映射)技术,两家公司共同提供了SLAM on Chip(注1)的解决方案。
此SLAM on Chip能够在一颗SoC上实现3D SLAM处理,而此功能在以往通常必须要藉由高性能的PC才能达到。该解决方案也实现了仅靠光达数据便可完成的3D映射,省掉了惯性测量单元(IMU)和全球定位系统(GPS)的数据。藉由此合作,让汽车系统中具有低功耗及高等级功能安全的即时3D映射系统得以实现。
随着汽车市场为迎接无人驾驶时代而进行着各种准备,感测器技术针对无人驾驶车辆所需特性(包括对环境的即时高精度感知、汽车的精确定位、以及即时感测器融合)的优化,仍然是一个重大的挑战。
光达目前已成为其中的一项关键性感测器,与摄像机及雷达等其他方案相比,光达能提供更高精度的车辆周围障碍物感测,以及汽车控制所使用的即时电子控制单元(ECU)管理。新光达感测器技术所提供的数据量的快速成长,同时提高了对这些数据进行高性能即时处理的需求。
瑞萨电子全球ADAS中心??总裁Jean-Francois Chouteau表示:「瑞萨与Dibotics公司在技术上的无缝结合,为先进的光达数据处理实现了具有高等级FuSa能力,且即时而高效能的解决方案。」「对於无人驾驶而言,瑞萨正透过与具有创新能力的市场夥伴合作,来优化我们端对端的Renesas autonomy平台。Dibotics公司正在为光达市场提供改变游戏规则的顶尖技术,我们很高兴地宣布与他们的合作由此展开。」
Dibotics公司CEO兼共同创办人Raul Bravo则指出:「光达感测器将在所有的ADAS和自动驾驶功能中,扮演关键性的角色。此次合作,把瑞萨设计专业的精华与Dibotics的独特技术完美结合,以提供最尖端的性能,并且将能够让OEM、一线供应商以及光达制造商,降低开发成本且加快产品上市时间。我们很高兴能够与瑞萨这样的市场领导者合作。」
与现有的方法不同,Dibotics的Augmented LiDAR软体所实现的3D SLAM技术,只需要光达感测器所提供的数据便可实现3D映射。它不需要IMU、GPS、或轮盘式编码器(注2)的额外输入,因而可省去额外的整合工作负担、降低BOM成本、并简化开发作业。此外,该软体还实现了点分类(point-wise classification)(注3)、运动物体的形状、速度、轨迹的侦测和追?、以及多组光达的融合(注4)。
R-Car SoC透过其本身的高性能,得以执行Dibotics的Augmented LiDAR软体。它并具有低功耗的特点,且可符合ISO 26262(ASIL)FuSa标准所制定的高功能安全性。R-Car也是瑞萨针对ADAS和自动驾驶所推出的突破性Renesas autonomy平台的一部分,能够提供从云端到感测以至於车辆控制的完整端对端解决方案。
Dibotics公司将於2018年1月9日至12日,在内华达州拉斯维加斯所举行的CES 2018(中央广场北大厅,CP-5,法国汽车馆),展示其Augmented LiDAR解决方案。
(注1)SLAM on Chip(Simultaneous Localization and Mapping on Chip, 晶片内建同时定位和地图建构):SLAM是一种计算演算法,能够在追?车辆位置的同时,产生并更新陌生环境的地图。SLAM on Chip则是在SoC上实现SLAM技术。
(注2)车轮编码器可测量车轮的旋转,藉此可得到汽车的速度。
(注3)对於光达所提供的每个点进行自动分类,无需使用机器学习、先前的知识、或地图数据。
(注4)多组光达数据的即时组合,无需校准或同步化处理。




