本作品使用盛群微控制器HT66F70A做为控制核心,设计出一套自行车专用最佳变速决策系统,内含最佳踩踏点预测系统、电子变速机构及最佳换档机制。最佳踩踏点预测系统内有扭力感测器,用来得知当下踩踏频率及扭力状况。除了透过微控制器晶片收集扭力感测器资料进行自动换档,并透过指数平滑法分析踩踏频率以及扭力数据,判断换档当下的踩踏状态是否适合换档,避免造成空踩导致骑乘者受伤。
电子变速机构可在无须更动配件的情况下连结市售之变速装置,透过自动换档演算或手动按下手把上之按钮控制即可换档以及显示当前档位,再配合最佳换档机制避开不合理档位以及达到序列变速,避开大盘及飞轮位置差异过大,减少变速器及链条的磨损,最后使用伺服马达拉动变速线进行换档。本作品能够有效的避免使用者在变速上的操作不当,降低在错误换档时会产生的危险。
自行车变速系统提供骑乘者在不同车速下皆有舒适之骑乘环境。完整之外变速系统包含了大齿盘与飞轮、前后变速器、变速拨杆、变速钢索及链条[1]。随着自行车的发展及技术的提升,自行车的变速档位越来越丰富,但是骑乘者常常会因为组合太多,导致在执行变速判断错误产生许多问题,例如:没有熟记齿轮比导致换档后重踩或空踩、大小齿轮配合不当造成链条磨损或者不正确的换档时机进行换档导致链条落链或卡死的情况发生。这些都可能会导致骑乘者容易耗费过多体力,甚至发生危险或是造成身体伤害。
自行车变速器分为电子和机械两种,大部分自行车多为机械式。目前电子式变速器虽然性能优异换档速度快且精准,然而单价高且相关零组件都必须同步更动,导致市场普及率不高,仅有高端玩家及竞技的市场采用[2]。
由于机械式变速器已具有良好的机械精度,在既有的机构上进行改装电子化,不仅成本较低也能够达成一般使用者对于自动化与电子化的需求。使用者只须购买外挂式的电子套件,将变速拨杆移除改为电子按钮,连结原有变速钢索即可进行升级,达成自动换档、快速换档、最佳换档时机、最适合齿轮比匹配等功能。相信对于使用者具有很大吸引力。
工作原理
本作品使用盛群微控制器HT66F70A做为系统控制核心,设计出一套可外挂式的自行车最佳变速决策系统,并透过扭力感测器的数据判断踩踏扭力以及踩踏频率。当需要换档时使用伺服马达控制变速装置拉动变速线控制自行车原有之变速结构,并配合演算法达到自动换档、最佳化传动效率的序列变速、避开不合理的换档档位、在踩踏扭力最大时机换档等多项创新功能,其各项工作原理与演算法则说明如下。
最佳踩踏点预测
自行车动力是经由骑乘者透过脚踩踏踏板而来,而当单脚踩踏自行车时可将其视为五连杆机械结构[3]。当踩踏至踏板不同位置时,所产生的力道也不同。
考量双脚轮流踩踏的情形在高的位置是最佳变速的踩踏位置,此时扭力为最大值。而当踩踏低的会是扭力最小的时候,此时换档则发生变速不顺的情况,且容易造成踩空危险。因此使用扭力感测器内建的红外线感测器,感测踩踏位置,并结合扭力感测器,先利用指数平滑法预测并判断是否位于最佳变速时机,并在感测有无扭力连续发生,若都成立则进行换档。
最佳换档机制
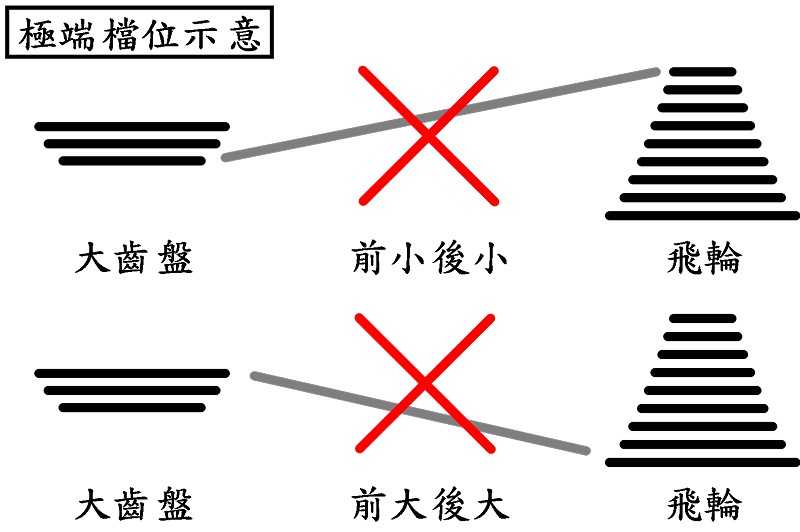
排除不合理档位
自行车骑乘者可能会因为变换档位时换到不合理档位如图一,造成齿比差距过大导致链条承受的压力过多,导致变速器及链条磨损造成损坏。透过此系统排除掉不合理档位
序列变速
由于机械结构复杂,齿轮比与变速器之间的关系并非线性,使用者常常变速时换至不正确的档位容易造成空踩或是阻力忽然增加。如表一所示,当变速器为前2档,后2档(齿轮比为1.07:1),下一个档位却是前3档后5档,使用者不须熟背齿轮比,仅需使用按钮装置即可达到线性变速。
表一:变速器档位与齿轮比关系
|
?
|
后1
|
后2
|
后3
|
后4
|
后5
|
后6
|
后7
|
|
前1
|
1.29
|
1.47
|
1.69
|
1.91
|
2.20
|
2.59
|
2.93
|
|
前2
|
0.94
|
1.07
|
1.23
|
1.39
|
1.60
|
1.88
|
2.13
|
|
前3
|
0.65
|
0.73
|
0.85
|
0.96
|
1.10
|
1.29
|
1.47
|
指数平滑法
本系统将扭力数值使用指数平滑法做演算,而指数平滑法是布朗(Robert G. Brown)所提出[3],布朗(Robert G..Brown)认为时间序列的态势具有稳定性或规则性,所以时间序列可被合理地顺势推延;他认为最近的过去态势,在某种程度上会持续到最近的未来,所以将较大的权数放在最近的资料。
一次指数平滑公式:
St=ayt+(1-a)St-1
二次指数平滑公式:
St(2)=aSt(1)+(1-a)St-1(2)
其中St
为时间t的平滑值,
Yt
为时间t的实际值,St-1
为时间t-1的平滑值,a为平滑常数,其取值范围为[0,1],仅需要两个数值,
即Yt和St-1
,
再加上平滑常数a,使指数滑动平均具逐期递推性质。平滑常数a越接近于0,远期实际值对本期平滑值影响程度的下降越缓慢。
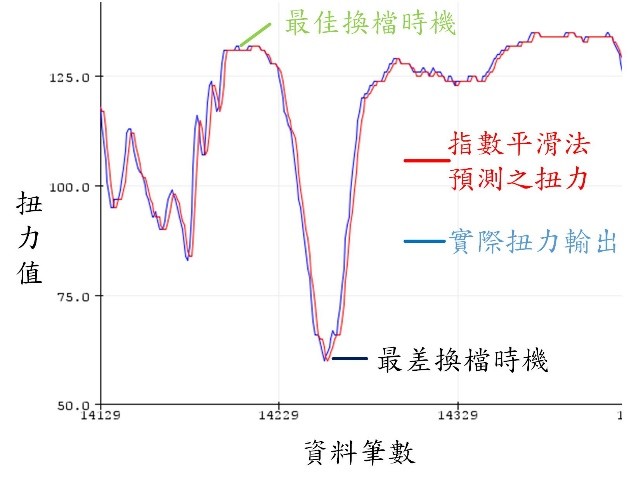
利用此演算法特性台预测扭力未来值。图二为本作品实际量测一次踩踏扭力变化的情形,可以发现红色使用指数平滑法预测之扭力有非常高的正确性。因此利用此方法预测最高扭力输出位置作为换档时机,将有助于链条有效咬合,增加传动效率避免空踩落链。
作品结构
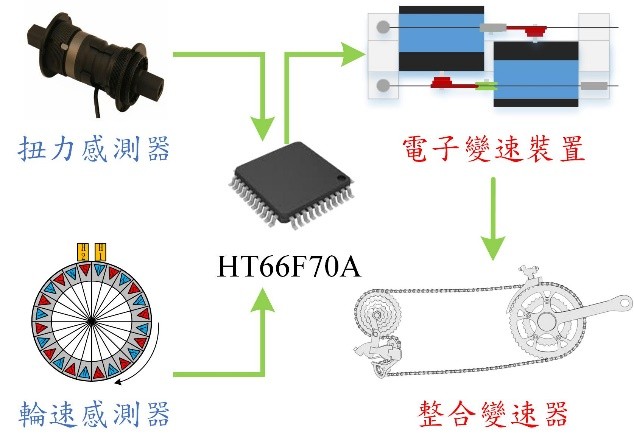
系统架构图
本作品以盛群HT66F70A晶片为主控制晶片,配合中轴扭力感测器、轮速感测器、伺服马达、按钮装置与拉线式变速机构,本装置系统架构图如图三所示。
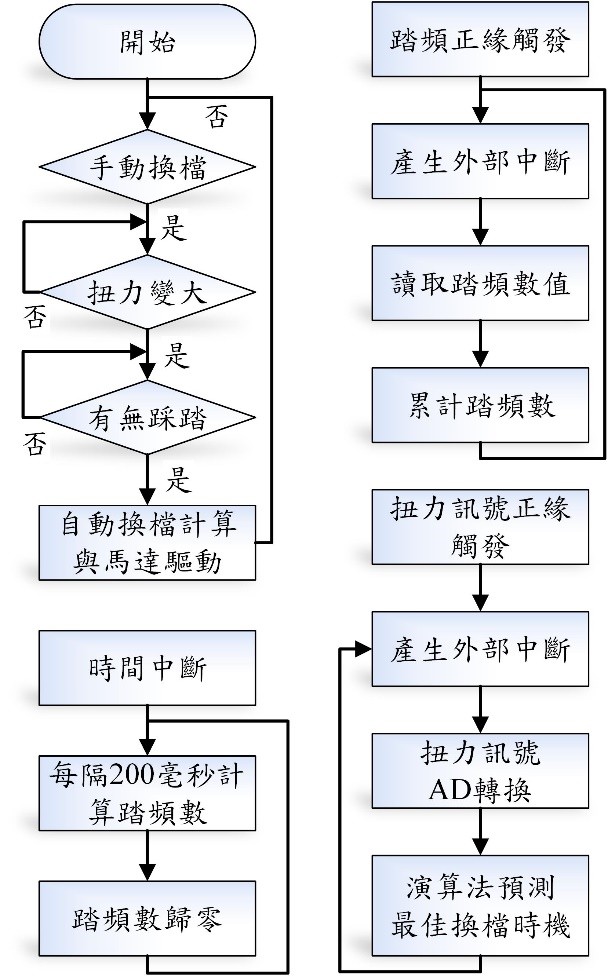
系统流程图
图四为本作品系统流程图,当使用者进行换档动作时,微控制器读取扭力感测器得知目前扭力及踩踏频率,并且套入指数平滑法进行预测,若预测结果适合换档,则系统输出PWM脉波讯号至伺服马达拉动变速线进行换档。
微控制器HT66F70A
盛群晶片HT66F70A:将量测到的扭力感测器数据经由A/D转换后,判别是否有无踩踏,在经由收集轮速感测器的数据,判别是否在于最佳踩踏点位置,再以脉波调变输出控制启动伺服马达拉动变速线至合理档位。
扭力感测器
电阻式扭力感测器架设于自行车踏板中轴中,并提供双曲柄(两脚踩的力道)感测功能,当踩踏扭力越大所量测到的电压会越高。将此讯号以微控制器之类比数位转换器得知数据。
轮速感测器
轮速感测器架设于自行车踏板中轴中,内置滚动轴承感测踏板位置,依照转动情形输出5V级的准正弦波电压(10脉波/圈)。此讯号的频率,即每秒钟产生的脉冲个数,反映了踏板踩踏的快慢,通过脉冲的频率即可得知踩踏速度。
伺服马达
本作品将伺服马达用于拉伸变速器的大盘及后飞轮链条位置,以调整变速器段位。 Futaba S9177SV/HPS-700为标准数位高扭力的两组伺服马达,当接上7.4V电源时,最高可耐重41 公斤与74公斤,速度为0.11秒/60°与0.12秒/60°,符合本作品控制变速器需要的力量与速度。
自行车变速器
使用市面上目前主流的自行车外变速器,完整的外变速系统包含了大齿盘及飞轮、前后变速器、变速拨杆、变速钢索及链条。利用此变速器类型,将钢索导引至伺服马达上的摆臂圆盘,已达到自动控制变速器的功能。
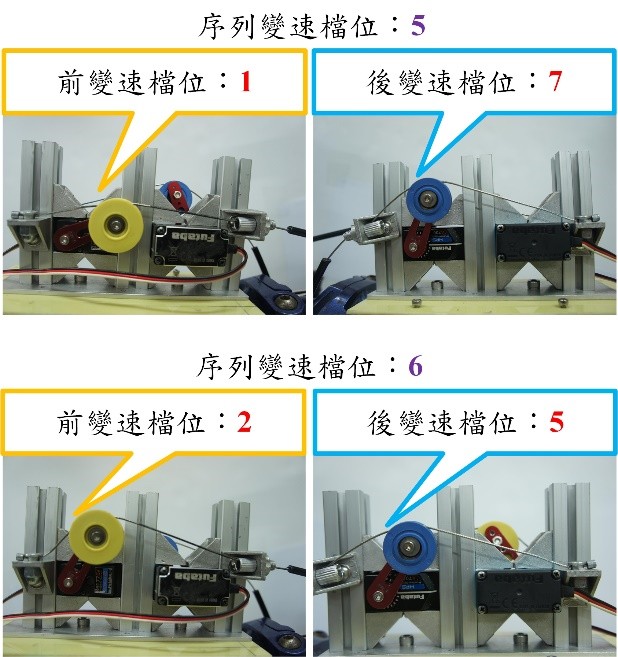
电子变速机构
将前后变速钢索拉至本电子变速机构并透过微控制器输出脉波讯号给伺服马达以调整摆臂的角度不同,改变变速线松紧度,以调整前后变速器关系及档位,如图十为当骑乘者从序列变速中的第五档升档时,伺服马达因改变摆臂的角度,而变换至序列变速中的第六档。
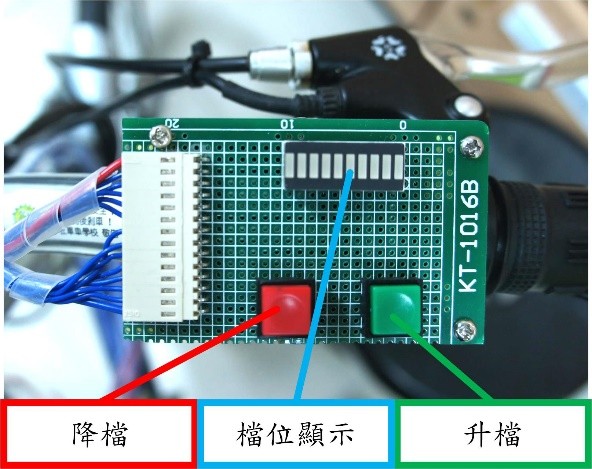
手动变速按钮
当骑乘者更变至使用手动变速模式时,使用者可以按下安装于手把之升档按钮或降档按钮以切换档位,如图十一,同时换档也对照序列变速如表2变换档位。
测试方法
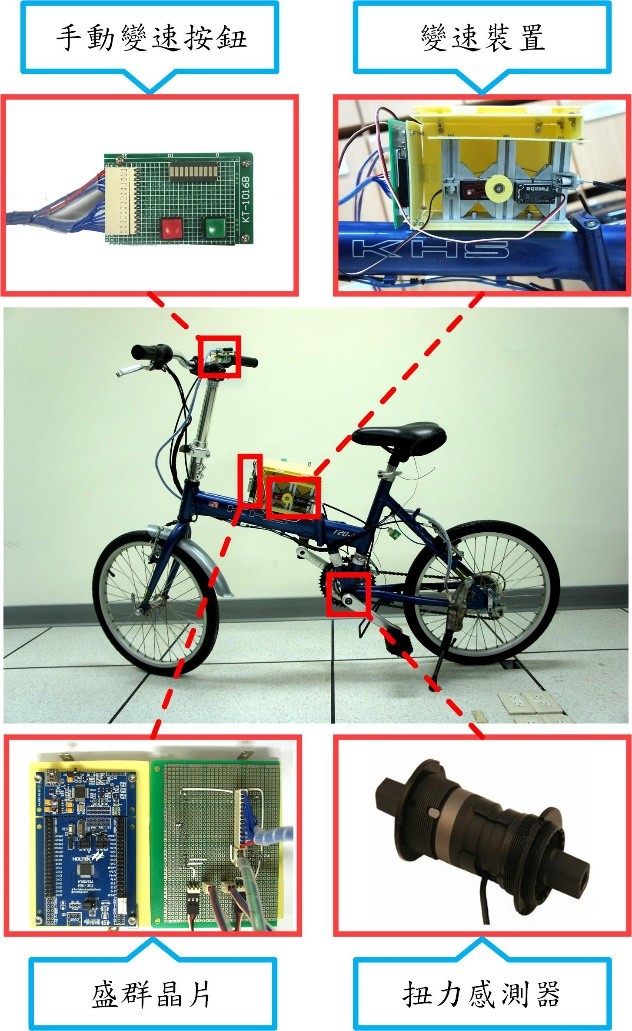
硬体系统安装
本作品将盛群微控制器HT66F70A安装于车身,龙头上装有按钮装置,车架上设置了电子变速机构,扭力感测器架设在大齿盘中,如图十二为本作品的硬体位置图。
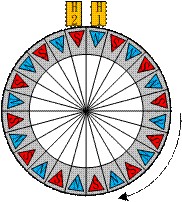
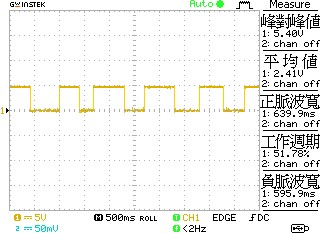
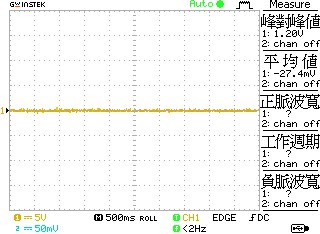
红外线感测踩踏频率
装设于自行车曲柄轴内的轮速感测器,当曲柄轴旋转一圈时,红外线感测器会收到十个脉波讯号如图十三,无转动时则如图十四。
序列变速测试
当骑乘者为使用自动变速时,会将骑乘者的踩踏扭力对照该档位的平均扭力值,一旦超过该档位的平均值时,会自动将电子变速装置调整至适合当下骑乘的档位,当切换档位时微控制器会控制伺服马达,使用PWM脉波宽度调变档位,并参考表一整理出循序切换档位如表二。当系统从序列变速中的一档切换至序列变速中的二档,则参考表二前变速器维持不变,后变速器则切换至4档,如此一来则可以让初学的骑乘者省去很多不便,并且可以非常简单轻松的骑乘如图十五。
表二:序列变速列表
|
序列变速
|
前轮档位
|
后轮档位
|
齿轮比
|
|
1
|
3
|
3
|
0.85
|
|
2
|
3
|
4
|
0.96
|
|
3
|
3
|
5
|
1.1
|
|
4
|
3
|
6
|
1.29
|
|
5
|
3
|
7
|
1.47
|
|
6
|
2
|
5
|
1.6
|
|
7
|
1
|
3
|
1.69
|
|
8
|
2
|
6
|
1.88
|
|
9
|
1
|
4
|
1.91
|
|
10
|
1
|
5
|
2.2
|
自行车专用最佳变速决策系统测试
本实验在完成各项单元测试后,进行软硬体整合,并请同学测试,经测试调整各项参数后,完成本套系统,以图十六为该同学于起步后一秒进行升档动作,经过演算法演算后,成功切换档位。
(本文作者陈智勇1、许嘉洲2、刘羽哲3、杨圣达4、蔡明智5为树德科技大学电脑与通讯系1教授、2-5学生)
参考文件
[1]林T. Y.,“关于自行车拨链系统测试的研究,”Ph.D.
[2] SHIMANO, 电子变速系统套件Di2, DIGITAL INTEGRATED INTELLIGENCE https://bike.
shimano.com/zh-TW/technologies/component
/details/di2.html
[3] M. L. Hull和M.Jorge,“自行车踩踏的生物力学分析方法”,生物力学,Vol。
[4] Brown, Robert G. . Exponential Smoothing for Predicting Demand. Cambridge, Massachusetts: Arthur D. Little Inc. p. 15, 1956.