工業化國家超過半數的電能消耗在電動馬達上。由於電動馬達佔三分之二的工業用電以及四分之一左右的家庭用電,因此改善電動馬達的效能,將可大幅節約能源並降低操作成本。設計馬達驅動時,主要應該考慮能源效率而非一般的「馬達價錢為何?」
新世代的微控制器可控制無刷直流馬達(BLDC)、永磁同步馬達(PMSM),與交流感應馬達式的能源效用,對降低整體能源消耗有相當的貢獻。
電動馬達的擁有成本主要來自電力成本。在整個使用壽命中,相較與原始購買價格與維護成本,電力佔了90%以上的的整體馬達成本。美國能源部(DOE)的資料顯示,使用效能高出4~6%的馬達,若每年運轉4,000小時以上,兩年即可回本。舉例來說,一般的200W BLDC馬達價格約為100歐元,比低效率的同等級有刷馬達大約貴了30%,但即使更換現有馬達不可行或需要非常高額的投資,將驅動控制器或演算法最佳化也很有意義。
一般的工業設施中,電動馬達大約佔了三分之二的整體能源消耗。若要改善電動馬達的效能並降低作業成本,必須考慮許多因素。
主要應該考量的因素包括:
- ●選擇高效率的馬達
- ●選擇正確的馬達尺寸
- ●選擇適當的馬達技術
- ●使用適當的控制演算法
馬達在低於全額定負載40%以下操作時,效率會大幅減低,因此正確的馬達尺寸對降低作業成本來說相當重要。馬達的尺寸應該讓負載因數介於65%到100%之間。一般習慣選擇較大的馬達尺寸,結果造成較低的馬達操作效率。
各種馬達技術如有刷直流馬達、無刷直流馬達、步進馬達或交流感應馬達,在購買價格、控制設計、作業成本與能源效率等方面,各有不同的優點。各式應用所使用的馬達控制類型(圖一)對能源效率有很大的影響。由於價格低廉且控制電路簡單,低功率的應用經常使用步進馬達與有刷直流馬達,然而其能源效率較低,因此作業成本較高。BLDC、PMSM或交流感應馬達加上高效能馬達控制演算法,再搭載最佳化的微控制器,可以提供最具能源效率的解決方案。無刷馬達可以採用多種馬達控制系統演算法,包含梯形、正弦,以及磁場導向控制(FOC)等。
| 《圖一 區塊轉換(Block commutation)》 |
|
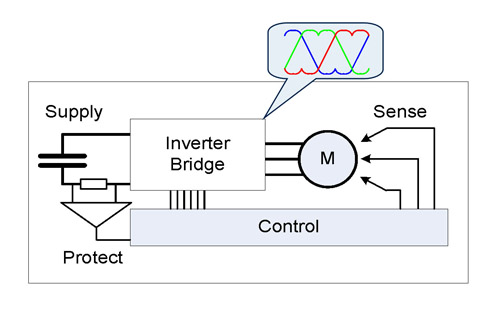
最簡單但效能最低的方法是梯形控制或區塊轉換,亦稱為六步控制(圖二)。六個換向步驟中,馬達驅動器提供兩繞組間的電流路徑,而第三個馬達相位則保持分離。轉矩漣波會造成效能限制,產生振動、噪音、機械磨損、以及伺服效能的降低。無刷馬達控制需要轉子位置的資訊以及馬達換向的機制。一般使用霍爾效應的感測器來感測轉子的絕對位置,但接線較多且成本較高。無感測器的BLDC 控制使用馬達的反電動勢來估算轉子位置,無需使用霍爾感測器。無感測器的控制對低成本的變速應用如風扇與幫浦等來說是不可或缺的。冰箱與空調壓縮機使用BLDC馬達時,也需要無感測器的控制。
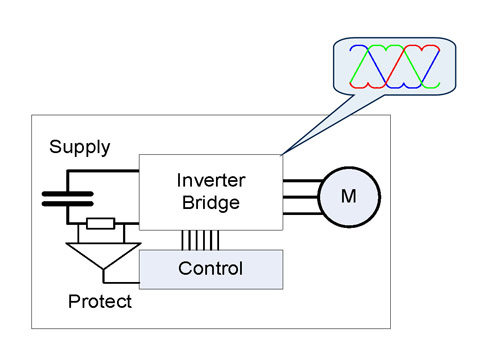
正弦控制也稱為電壓頻率(V/f)換向,可消除區塊轉換的部分問題(圖二)。正弦控制器以平滑的電流驅動馬達的三繞組,解決轉矩漣波問題並使旋轉順暢,然而正弦換向的基本問題,在於使用基本比例積分(PI)控制演算法來控制隨時間變化的馬達電流,而不計入相位間的交互作用,使得相位間的交互作用造成在高速時的效能損失。
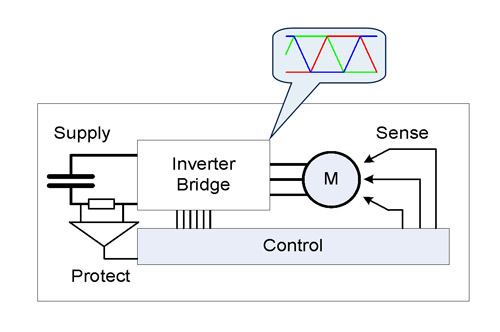
正弦換向在低速時可產生平順的動作,但在高速時效率較低,而區塊轉換在高速時相對有效率,但在低速時會產生轉矩漣波,因此出現了具備兩方優點的FOC(圖三)。FOC可使電動馬達的效率增至 95%,減少電力消耗、噪音,並提供優越的轉矩動態效能,使變頻器的效能提高,同量轉矩下可採用較小的功率級與較小的馬達尺寸。
FOC演算法是去除時間與速率的相依性,直接並獨立控制磁通量與轉矩。FOC 演算法使用克拉克與派克數學轉換公式(Clarke and Park transformations),將馬達的電性狀態轉換為兩維的時間不變旋轉框架。FOC可用於交流感應與無刷直流馬達,改善效率與效能,也可用於現有的馬達上,將控制系統升級。
結論
對於高效馬達驅動的需求,使得微控制器必須具備越來越多的功能,如具有霍爾感測器/不具感測器的BLDC馬達區塊轉換、BLDC或PMSM馬達的FOC、交流感應馬達的V/f換向,以及複雜的高階馬達驅動器的FOC與PFC。完整的工具鏈、專屬的應用套件,以及最佳化微控制器,可幫助設計高效率的馬達控制,縮短上市時間。