物聯網(IoT)旋風已席捲汽車產業。從資訊娛樂系統開始,IoT已逐步演進,並在令人振奮的全新V2X架構中融合了感測器、定位、蜂巢式以及短距離通訊技術,將能提升安全性與駕駛體驗,並加速無人駕駛車的發展。
u-blox台灣區總經理江敏楠表示,V2X最讓人振奮的是它具備了開啟認知式汽車(cognitive automobile)新世代的潛能 ─ 不僅能知道汽車自己本身的狀態,還能了解其他車輛、環境、天氣、路況、交通、以及其他可能會影響駕駛安全與旅遊效率的重要參數。
這將使汽車超越娛樂和傳統的IoT應用,進入到「關鍵物聯網」的範疇。過程中的任何錯誤 ─ 從關鍵的感測或定位元件,到遠端分析、以及最終回應 ─ 都可能為駕駛甚至OEM業者帶來災難。因此唯有透過可靠、低延遲的通訊進行適當的量測,並採用經過驗證的設計技巧,和可靠的元件或模組,汽車認知才能為安全、可靠、以及真正的無人自動駕駛奠定基礎。
從V2X邁向無人駕駛汽車
江敏楠指出,V2X所需的各種技術多已就緒,或是正積極研發中,但就汽車設計週期來看,V2X要能真正上路可能還需要好幾年的時間,因為從概念到量產大概要三到四年,這與一般消費性裝置不到18個月的快速替換是截然不同的。
他強調,汽車設計週期耗時較長,主要是因為設備故障時會造成嚴重的危險與損害責任,近來的駭客事件更是強化了安全的重要性。
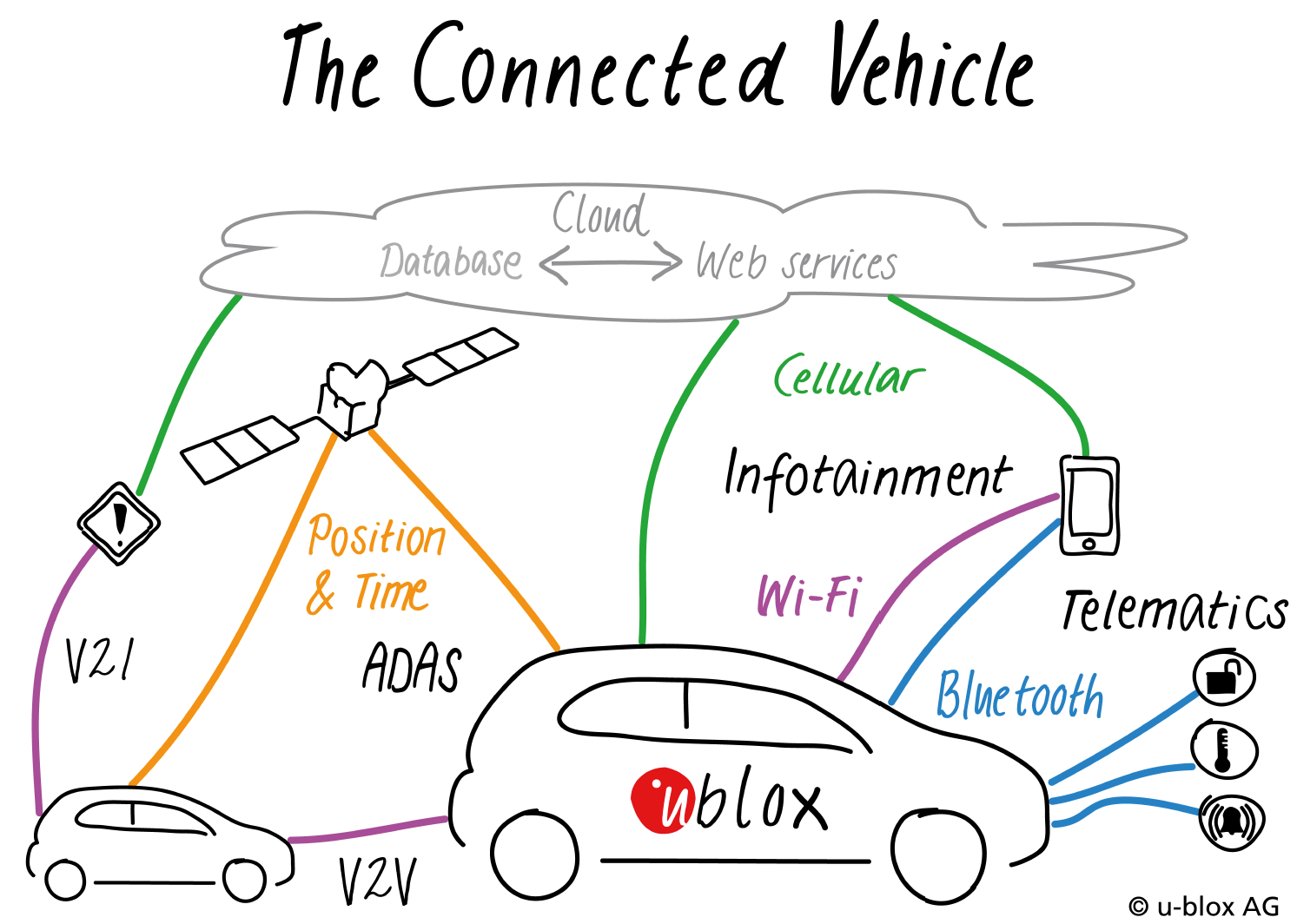
| 圖一 : IoT連網汽車將整合感測器、低成本處理、無線通訊、精密定位以及雲端分析,以實現V2X願景 |
|
許多連網汽車的相關應用都需獲得準確的定位,因此必需採用多重GNSS系統、多路徑抑制、卡爾曼濾波 (Kalman filtering)、多頻率處理、以及3D慣性導航等技術。此外,真正的定位準確度應取決於真實世界的動態效能,以及它是否能與加速計、陀螺儀以及ABS速度感測器的資訊妥善地整合在一起。
由於歐洲和俄羅斯現在已經強制要求eCall服務的準確度到1公尺以內,美國也將有類似的標準,因此選用正確的POS接收器或模組已成為所有汽車製造商的首要考量。從電信業者的角度來看,模組化方式也是可行,因為美國的電信業者已要求裝置在實際運作前必須先完成遵循性認證,以確保裝置的可靠與安全性。
江敏楠認為,隨著V2X和物聯網的重要性與日俱增,汽車和車隊管理將是下一個重要的科技戰場,對硬體、軟體和服務創新等產業,都將帶來龐大商機。如何及何時能實現無人駕駛汽車的目標,將取決於這些關鍵的第一步以及未來的成效結果。設計人員必須盡可能降低快速創新的風險與錯誤,因為這些高風險所造成的錯誤會危及生命安全並導致對產品信心的流失,所以選擇正確的技術以及合作夥伴
將是重要關鍵。u-blox的產品組合包含所有必要的連接技術,特別是無線與定位晶片和模組現已廣泛運用在多種車用產品中。因應連網汽車的發展,u-blox將持續推動創新,以兼具效能、安全性與成本效益的最佳方案協助客戶開發新一代產品,掌握市場先機。