在工廠自動化的領域中,運動控制主要是指伺服操作的控制,以及與此控制有關的運算處理,透過運動控制機制來執行處理設備的動作和控制。
由於每台的設備均由馬達驅動,當馬達通電時,馬達會將電能轉換為動能,因此運動控制指的也就是控制馬達。透過有一個控制馬達主體的驅動器,和一個馬達控制板,利用馬達控制機制來輸出並控制脈衝信號,下達動作指令來進行控制。
目前工業用的機器人可以±0.1 mm或更小的精度控制各種操作,這些都是取決於馬達控制機制的能力值。例如,當使機器人執行諸如畫圓之類的操作時,必須以一個脈衝為單位,非常精確地調諧和控制多個伺服馬達,即使乍一看似乎很容易,實際上也會執行非常複雜的運算處理。馬達控制機制可以代替PLC來執行複雜的運算處理,例如對多個伺服馬達(包括需要此類運算處理的機器人)進行調諧控制和定位控制。
另外,運動控制機制通常是安裝在伺服馬達上,但其他的裝置,例如傳送帶控制,多軸機器人的軸控制、定位控制以及各種控制設定,則是遍佈設備或工廠各處,因此為了精確地進行控制,就需要透過運動控制來完成。還有,在精密機械加工、機器人、繞線機、半導體製造設備等,運動控制也是不可或缺的。
簡單的說,運動控制可完成包括了正確的多軸控制、轉矩控制、對作業動作機構(機器手臂等)進行同步、協調的運動等。不過定位控制器是無法進行輪廓控制。
機器人的運動控制,基本上是內置在機器人控制器中,雖然無需使用可連接到PLC的控制器,但在內部製造組合多個伺服電機的設備時,就必需要運動控制器(圖1)。
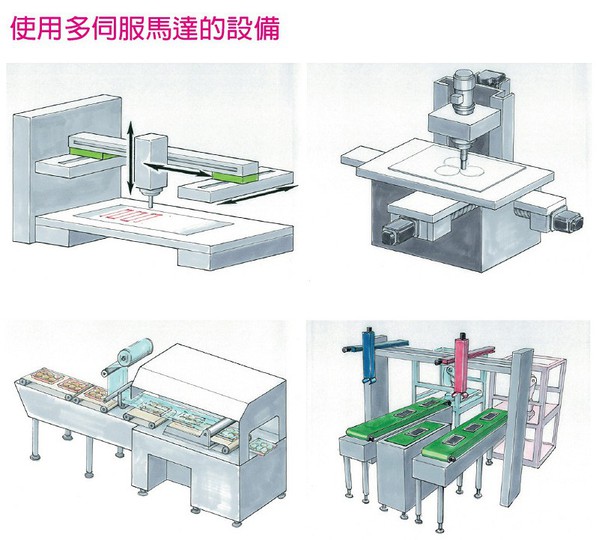
| 圖1 : 需要運動控制器來對多伺服電機進行管理。(source:富士電機) |
|
對於連接有多個伺服馬達的傳送裝置來說,例如將多個機器人連接在一起的情況下,因此在透過機器人來進行大規模自動產生時就必須使用這些機制。
運動控制器主要由伺服電機的業者提供,由於每個伺服馬達的脈衝轉速都不同,因此各家業者都只能提供支援本身的伺服馬達的控制器。而這些業者也提供了多種類型的運動控制器,可以依照使用的情況來決定採用的規格。
簡單的說,每個類型規格最大的不同點是用於運算處理的CPU的性能。如果CPU具有高性能,則將縮短運算處理所需的時間,進而而可以高速執行運動控制。還有由於可以增加處理量,因此高性能運動控制器可以由單一個控制器來控制的大量伺服馬達。一般來說,可以控制在2到32個軸範,不同能力值的運動控制器可控制的軸數是不同。儘管用於開發控制軟體的基礎語言會因業者而異,但基本上大多是使用FA編程語言(例如SFC語言和ST語言)進行開發。
傳統包裝設備的運動控制模式的缺點與改善
在智慧製造技術的背景下,需要更進一步地提高生產效率,以及在製造業中對於工廠自動化進行最大化的附加價值。目前全球各電機業者已經能透過充分利用IoT來提高製造和加工產線的生產率並降低成本,或是對於食品工廠的包裝線,開發了新一代的運動控制技術,來達到高包裝速度,以及穩定的密封加工的最佳控制。
在亞洲,包括中國和印度,對食物的需求隨著人口的增長而增加,對食物包裝設備的需求也顯著增長。目前包裝設備業者正在透過從機械方式更改為伺服方式來提高效能,以增加單位時間的包裝量。
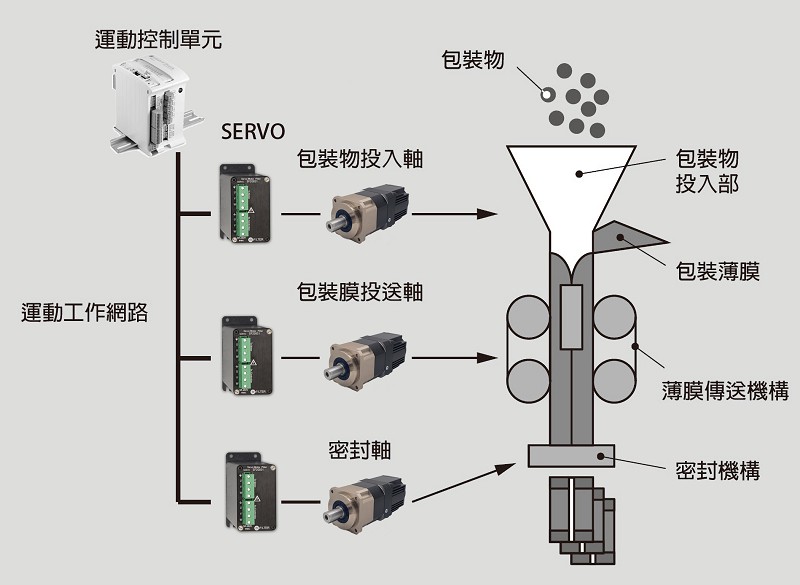
立式枕狀包裝設備的基本系統結構如圖2所示。立式枕狀包裝機使用的薄膜傳送機構是從上到下地垂直地輸送包裝薄膜,主要是利用重力將包裝物傳送給到薄膜之中,然後使用加熱式封口機構來進行密封袋口。
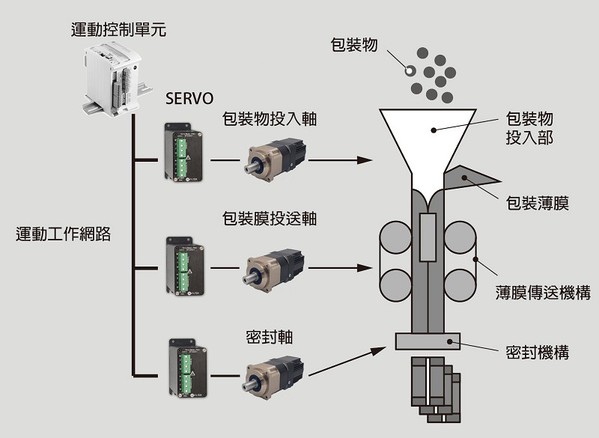
| 圖2 : 傳統立式枕狀包裝設備的基本系統結構。(source:富士電機) |
|
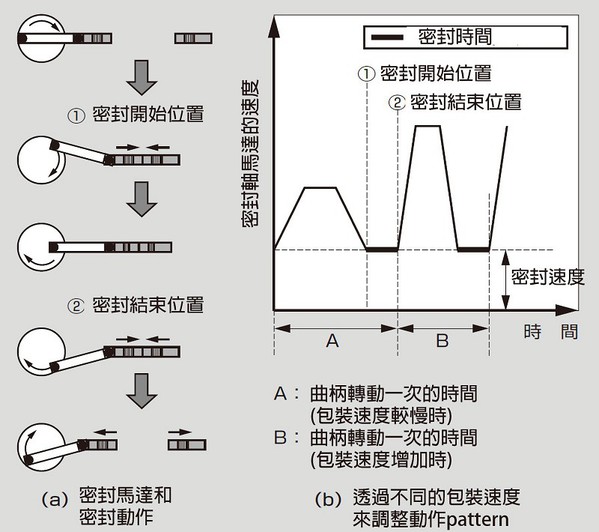
在傳統上,控制的方法就如圖3中所示。薄膜傳送軸馬達和封口軸馬達的位置通常是,透過梯形的加減速來控制,並且每個軸的旋轉速度,是與包裝速度相對應的比率來確定。增加包裝速度會增加密封機構的撞擊速度,並增加撞擊力。這樣的結果,會對整個機器產生震動,進而對於穩定的密封品質造成影響。
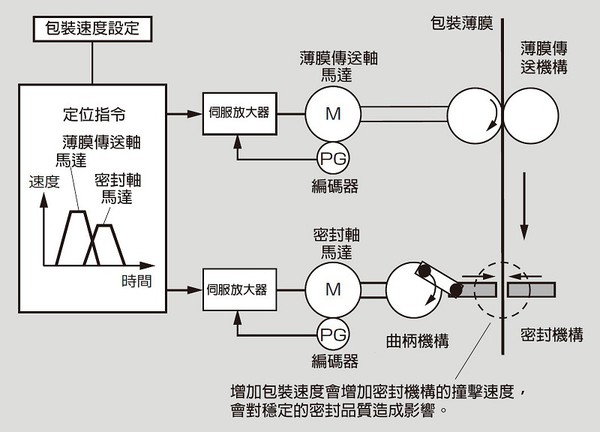
| 圖3 : 增加包裝速度會對於穩定的密封品質造成影響。(source:富士電機) |
|
日本富士電機提出了一個透過PLC來調整包裝機控制的概念(圖4)。在這樣的運動控制中,進行密封薄膜時,密封軸的旋轉速度可以保持恆定,並且可以透過改變其他部分的速度來改變包裝速度,進而達到無論包裝速度如何調整,都能夠進行穩定的密封作業。透過這樣的機制,在實際的應用上,能夠大幅度的提高包裝速度。
| 圖4 : 透過PLC來調整包裝機控制,提高包裝穩定度。(source:富士電機) |
|
訊號傳送和控制正朝多元化的發展
但就趨勢觀察,運動系統的確是逐漸趨於複雜化,由於通訊式架構可以針對更多不同的功能進行配置,在複雜的產線上將可發揮更大的作用。業者指出,在複雜化的系統上考慮的不是單點的運動效果,而是整個生產線的流程整合。當動作複雜的時候,業者會想要了解整個生產線系統上的機台是如何運作的,這時在上位的資料整合的軟體系統的重要性,也就被凸顯出來。
雖然PLC目前仍佔有運動控制大部份的控制器市場,不過PC-Based 控制器已漸漸擴大了市場占比,主要原因在於現在生產系統都要求整合,尤其是往上層或與IT系統的整合。而現在的製造管理軟體,幾乎都是Window Based,這與傳統PLC架構格格不入,相對的,PC-Based控制器所提供的Ethernet介面、RAM、儲存裝置(CF)、作業系統與關聯式資料庫連接,都可以用非常低的價格取得,而且整合非常容易。
因此開始透過IPC等PC-Based設備來規劃運動控制的應用,也形成運動控制系統的不同選擇。PC-Based類設備被認為在功能性上的確較為強大,但在穩定性議題上也造成相當的不確定性,所以在傳統上除非是在PLC無法負擔之時,才以IPC取代,加上IPC的成本相較於PLC來說的確較高,以及在提升介面時的複雜度問題,這些面向也每每成為兩陣營相互較勁之處。不過雖然IPC成本較其他架構為高,但由於其容易與資料庫及I/O進行整合,也受到廠商相當的關注。
目前以技術而言,運動控制的訊號傳送技術主流,包括了脈衝式和通訊式為主。無論是採用脈衝式或通訊式的運動控制,多取決於應用及環境的需求,例如,脈衝式大多應用在單機、軸數較少、獨立運作的設備,而系統較龐大、且多軸應用的產線,為了降低配線的複雜度,就會以通訊式系統為主。
目前的運動控制器均都提供了這兩種應用技術,但並非在面對多軸的環境下,就非得選用通訊式不可,例如脈衝式控制器可以介接的馬達選擇較多,會因為對於馬達成本的考量,而期望採用脈衝式控制器,因此在這樣的需求下,已經有業者針對脈衝式的控制器,開發出「虛擬軸」的技術來支援多軸控制應用。
但目前傳統脈衝技術的弱點逐漸出現,尤其是雜訊的干擾,例如馬達間互為雜訊的干擾已經相當嚴重,使得同步訊號地無誤傳送更加困難,目前在較複雜的應用底下,控制器已經開始透過以數位的訊號取代脈衝命令,來提高訊號的精準度,達到多軸同步應用的目標。
在雜訊解決上,大多以提高控制器的晶片效能,來增加抗雜訊干擾的能力,或是以高脈衝傳送的方式來降低雜訊所造成的影響。這是因為雜訊干擾的問題在系統上是一定會出現的,不過,如果能過高脈衝的方式,就可以有效的降低雜訊干擾,提升運動控制的精準度。
軟體平台控制是運動控制趨勢技術
透過CPU來進行指令處理,再以軟體經由透過網路來控制各種馬達、機器,這種所謂的軟體運動控制,已經是近年來產業相競開發的趨勢技術之一。
軟體運動控制是透過函式庫與高階語法,進行開發控制機制,這非常適合用應在規劃大型系統,來進行高度複雜的動作規劃,這種作法在PLC的架構上不易做到。軟體運動控制的發展除了彈性應用之外,另外一個重點在於「智慧製造」,基於這樣的架構基礎,可以依需求快速,且高彈性的調整產線的產能與製程。
當然,軟體控制也有一定程度的課題需要去克服,例如如果通訊介面無法共通整合,期望達到即時性控制會有一定困難,這方面是必須克服的。以目前來說,在通訊協定方面,大多數是採用EtherCAT技術,透過網路線即可支援大量工作站,讓所有工作站只須1微秒就可以接受到同步的指令。
以目前來說,可以觀察到軟體運動控制逐漸被重視,有幾項關鍵的條件,例如EtherCAT、Ethernet/IP 與 PROFINET等,能讓大量的元件高速溝通的數位匯流排;其次是,透過具有微處理器和內建記憶體的智慧驅動器,來進行開關扭矩、判定位置和速度,以及與系統內其他裝置溝通。
如前述,運動控制器是透過類比訊號將指令傳送出去,進行關閉控制機制和速度控制。如果面對大型設備或多軸應用的化,這樣會大幅增加成本、和設備操控的複雜度。
雖然軟體運動控制可以透過多應用程式來進行,但是面對簡單的作動並不能展現出優點。只有在面對高複雜需求、極小誤差、多軸數的系統,和高度同步的需求時,才會顯出軟體運動控制的高彈性與能力。
未來運動控制系統發展趨勢
近年來,產業已朝著智慧製造邁進,無論是物聯網,大數據分析和人工智慧等技術的發展。相信在未來,運動控制系統將朝向幾個發展趨勢。
更小體積來提供設備的體空間的優化
更小的體積,意味著可以在單位空間內放置更多運動控制元件,這是提升設備自動化,完成更多精細動作的基礎。其實並不僅僅是在單台設備的體積的優化,為了使多軸系統的硬體空間進一步優化,其他技術也不斷被應用。
更少接線和智慧型動控制網路
這樣一來可以提升設備工程實施效率、強化EMC穩定性,和減少佈線的困擾。所以,運動控制匯流排技術在今天已經是非常重要關鍵技術了,當設備動作越來越多時,繼續用脈衝和類比控制就會顯得相當吃力,因此發運動控制網路和智慧型數位系統將是主要趨勢之一。
更強控制處理能力來滿足多軸應用
隨著設備同步軸數的增加,除了控制器需要更強大,能夠以更快的速度處理更多的動作演算法。同樣是毫秒級的同步控制,3個軸、30個軸、到上百個軸,對於控制器的運算速度,和網路頻率和精度要求是有相當大的落差。隨著愈來愈高的生產的精密度與高速度期望值,相信設備中被使用的軸數將會愈來愈多,這對於系統的處理能力依賴就更高。
大資料和端雲計算
隨著運動控制功能的增加,設備的資料將以幾何倍數增加,設備各個動作的運行曲線、以及它們之間的相關性、步序的合理性、生產運行流程以及它們和設備運維、企業經濟效益等等資料之間的關聯性,這些都使運動控制元件將不再是單獨孤立的產品和系統,而是必然會融合到智慧型網路中去,成為智慧設備終端元件的一員。