本文採用步進馬達搭配蝸輪蝸桿組成變速機構,利用此變速機構取代傳統的手動變速,並且設計人體最舒適的踩踏頻率計算各檔位升檔與降檔的臨界值來判斷是否該變換檔位,不需騎乘者自行手動換檔變速,讓自行車具有自動變速控制的功能,使得騎乘者安全、方便與達到運動的功能等效果。本作品使用盛群微控制器偵測裝設於自行車後輪的轉速偵測器所得到的轉速值及加速度後,評估檔位的適用性或換檔時機,並且驅動變速機構來完成檔位更換功能,以達成智慧變檔自行車的功能。
因U-bike、綠色環保與運動健身概念興起導致近幾年來自行車的普及化,尤其是以U-bike的影響最大,使自行車在於短程外出代步工具中勝過於其他代步工具,許多國家的自行車步道還不是如此普及化,往往會造成自行車與汽機車爭搶車道的情形導致交通意外發生,在自行車步道尚未普及化前,騎乘者必須專注行車安全也需要手動變換檔位維持舒適的踩踏運動,但是往往會因檔位更換不適當導致騎乘者的運動傷害或交通意外發生。
現今自行車在社會上越來越流行及普及化,但真正知道如何變換檔位或換檔時機的人卻是屈指可數,然而目前市面上的變速自行車都得依賴騎乘者的手動換檔變速解決騎乘時導致不適感,而本研究主要讓騎乘者專注行車安全、舒適騎乘與達到運動的功能等效果。本研究設計人體最舒適的踩踏頻率計算各檔位升檔與降檔的臨界值來判斷是否該變換檔位,不需騎乘者自行手動換檔變速使自行車具有自動變速控制的功能,讓騎乘者得到安全、方便與達到運動的功能等效果。
這套自動變速系統的本意是為了讓騎乘者不需一邊觀察路況與手動更換檔位,使得騎乘者的安全性提高與降低運動傷害,以達到短程工具的優勢與運動的功能。
工作原理
控制核心
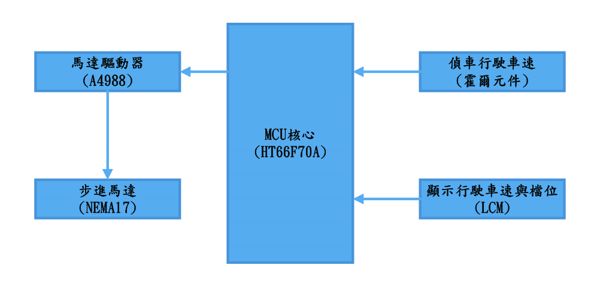
本系統使用盛群HT66F70A系列的微控制器晶片來讀取轉速偵測器的資訊計算後,再配合依人體踩踏頻率計算更換檔位的臨界值建立資料庫來判斷決策後驅動步進馬達運作。同時將偵測到行駛車速與目前自行車變速器檔位位置資訊顯示於LCM螢幕,使騎乘者可以藉由觀看LCM獲得騎乘資訊。
系統架構
本系統使用HT66F70A系列的微控制器晶片為主控制器,系統功能方塊圖如圖1所示。包含轉速感測、蝸桿蝸輪變速模組與微控制器模組。
實現方法
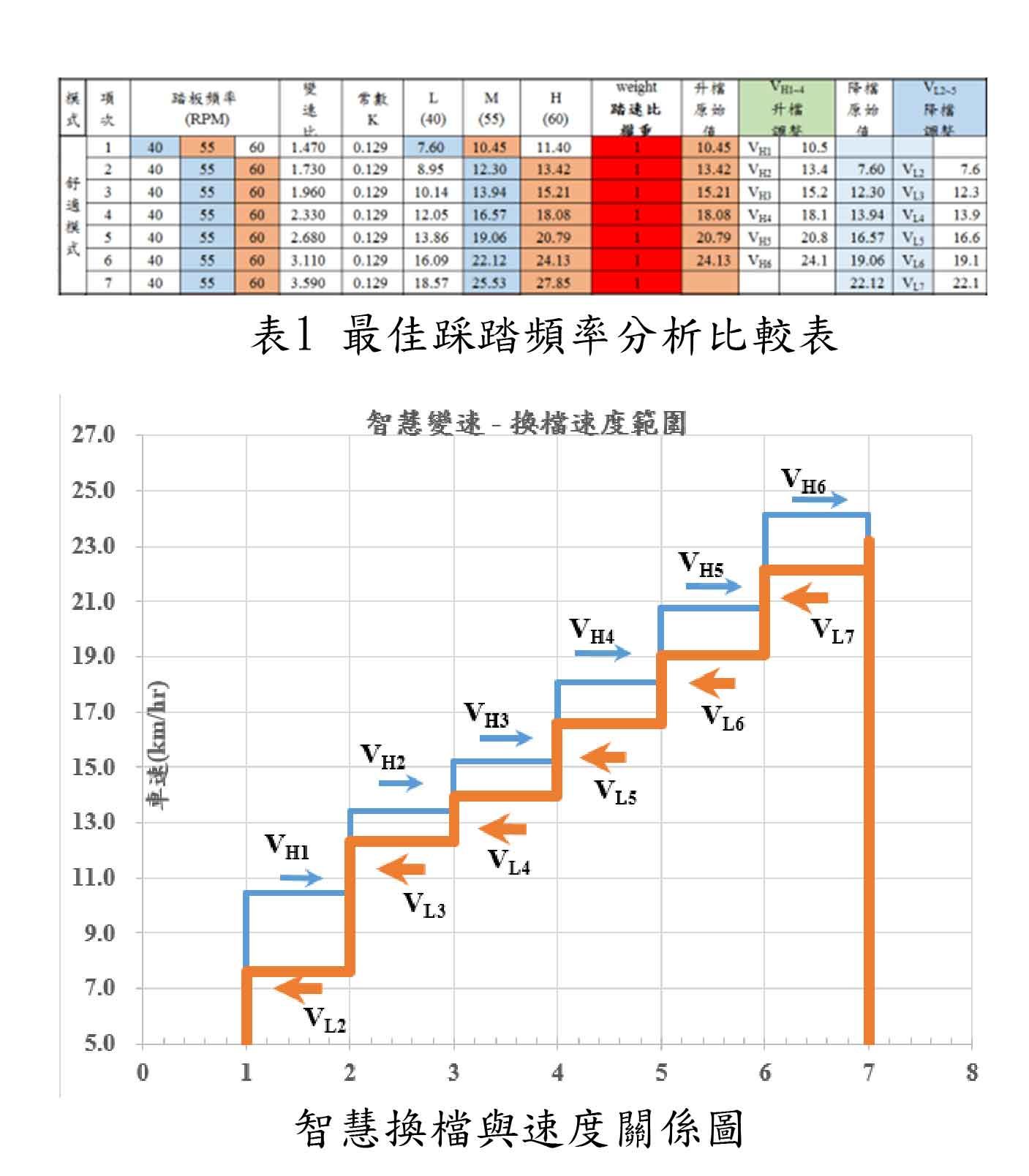
本系統的演算法利用行駛速度參數作為檔位判斷的依據,檔位升檔與降檔的臨界值係利用人體最舒適的踩踏運動頻率求得,搭配自行車變速器齒輪比計算各檔位升檔與降檔的臨界值以建立判斷檔位更換資料庫。根據實際測試中,發現一般騎乘者舒適的踩踏頻率為57.5 RPM,因此本作品採取40、55與60 RPM為踩踏頻率。
根據參考文獻[7]與參考文獻[20]提出對於一般騎乘者來說,踩踏頻率為40 RPM~70 RPM是最舒適的踩踏範圍且騎乘者腿部承受的力矩值較小,並且將踩踏頻率範圍搭配自行車變速器的齒輪比,計算出升降檔的臨界值作為判斷檔位的法則,表1(圖2中)為最佳踩踏頻率分析比較表。圖2為智慧換檔與速度關係圖,橫座標為檔位,利用不同的踩踏頻率計算升檔速度或降檔速度,讓各檔位升、降檔間有一個裕度以避免產生不斷變換檔位的情況,導致騎乘者的不適甚致產生運動傷害。
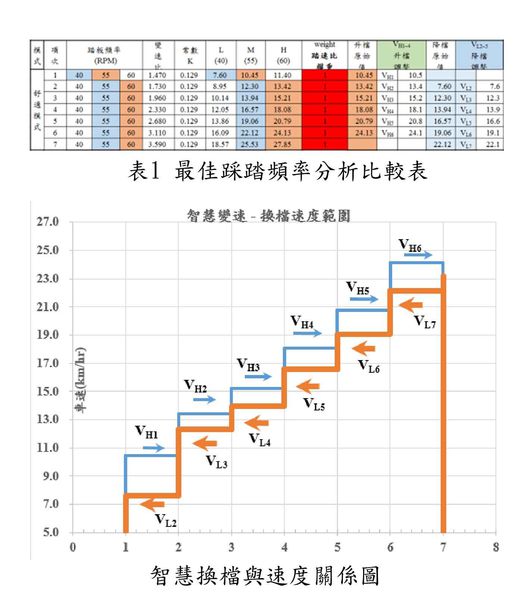
| 圖2 : 最佳踩踏頻率分析比較表/智慧換檔與速度關係圖 |
|
作品結構
本系統藉使用市售的12V/6W 交流發電機模組裝置於前輪的輪胎上,隨著車輪轉動帶動交流發電機而發電,規格為6W AC12V。經由AC轉DC模組提供直流電,除提供充電電源給電池模組外亦可提供一般3C產品的USB介面電源。
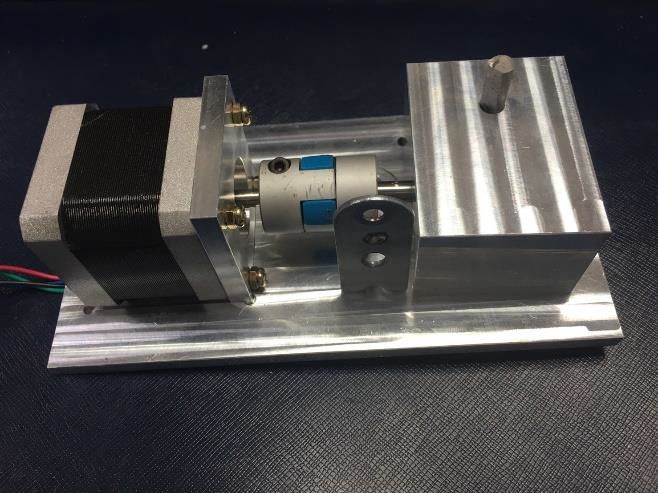
蝸桿蝸輪變速機構
本系統以PWM訊號控制步進馬達驅動變速機構以調整拉索位置達到精密控制檔位更換目標,亦可透過按鈕控制進行手動方式換檔。圖3為蝸桿蝸輪機構照相圖,圖4為蝸桿蝸輪變速機構模組照相圖。
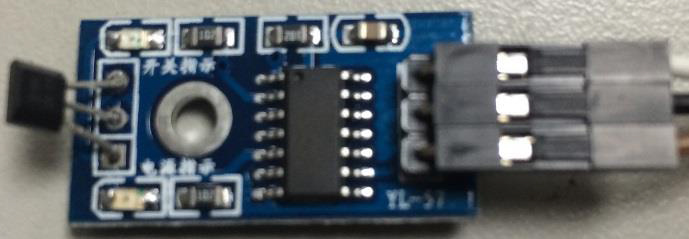
霍爾元件轉速感測器
霍爾元件轉速感測器裝置於後車輪的輪軸側面,並於車輪軸上設置三個強力磁鐵,當車輪轉動時,感測器因磁力經過產生脈波,控制核心進行車速計算。裝置一個霍爾元件於腳踏板上,並於前齒輪上設置三個強力磁鐵,當踩踏時,控制核心進行踩踏速度計算。圖5為霍爾元件照相圖。
硬體電路
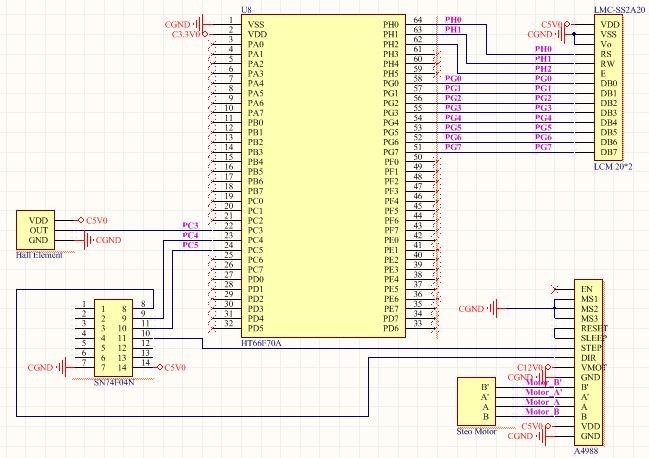
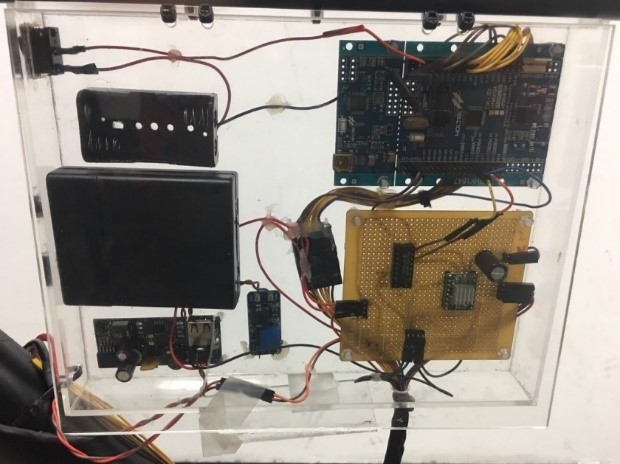
圖6為自動變速控制自行車控制電路圖,分別包含主控制器、LCM、霍爾元件感測器、反相器IC(SN74F04N)、馬達驅動器(A4988)與步進馬達(NEMA17),控制電路實體圖如圖7所示。
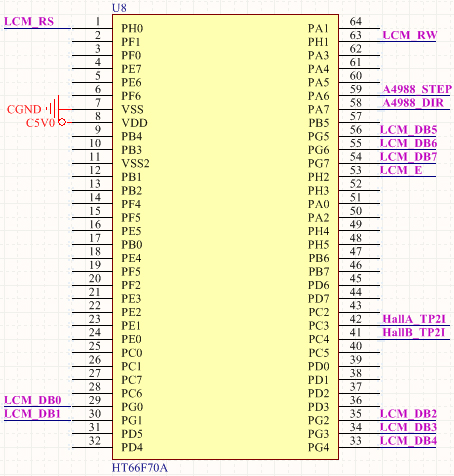
自動變速控制自行車處理單元為HT66F70A 微控制器,控制器電路如圖8所示。HT66F70A為Flash型式8bit的微控制器,微控制器時脈選用8 MHZ,內有看門狗計時器(Watch Dog Timer)的功能,內建多組多功能計數器(Counter)及計時器,PH0~PH2與PG0~PG7用來與LCM控制電路溝通,PC3用來接收霍爾元件感測器傳送過來自行車轉速,PC4與PC5用來控制A4988驅動器。
整體結構
本文的測試自行車如圖9所示,將自行車的前輪部份加裝12V/6W 交流電發電機,藉由自行車行駛時發電,經過AC轉DC的變壓模組轉換成直流電壓,再使用直流電壓提供蓄電池模組充電、液晶顯示模組(LCM)顯示、主電源開關控制板及步進馬達。後輪部分加裝霍爾元件轉速偵測器、三顆磁鐵平均安裝於後輪輪圈,變速器改裝為SHIMANO SG-7R46內變7速,圖9為作品完成圖。
軟體架構
本系統程式是以C 語言來進行撰寫,硬體主要由HT66F70系列來判斷霍爾元件感測器所提供訊號變化讀取轉速值,再配合加速度的函數取得後,取最佳值即可求得最適檔位參數。
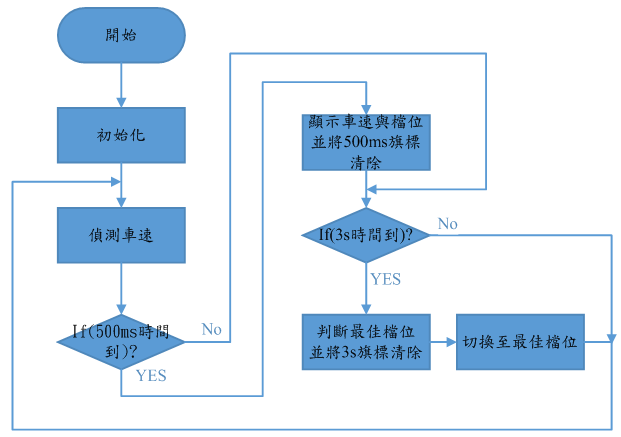
自動變速控制自行車系統軟體程式設計,主要針對霍爾元件感測器量測自行車的後輪轉速的訊號及檔位更換的功能,進行軟體的撰寫與設計,系統流程圖如圖10所示,系統自初始化開始之後,霍爾元件開始量測自行車行駛時產生的後輪轉速訊號,微控制器經由計算得出自行車的行駛車速,將這些資料與檔位更換資料庫比對,檔位更換資料庫包含檔位升檔的臨界值與檔位降檔的臨界值,比對找到合適的檔位後且切換至此檔位。
每500ms傳送行駛車速與檔位資料至LCM上顯示,每3s進行檔位判斷的功能並且將檔位切換至合適的檔位狀態。
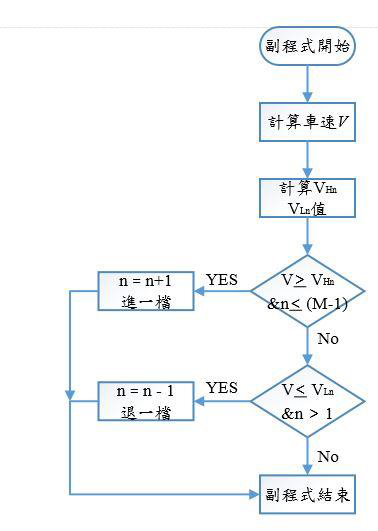
圖11為自動變速控制自行車檔位更換程式流程圖,3s啟動檔位更換副程式計算行駛車速與計算各檔位升檔的臨界值為VHn與檔位降檔的臨界值為VLn,則檔位更換有三種情形:
行駛車速V大於等於VHn時與小於最高檔位(M)時則進一檔(n = n+1)。
行駛車速V小於等於VLn時與檔位大於1檔時則退一檔(n = n-1)。
非以上兩種條件時則檔位保持現況。
實驗結果
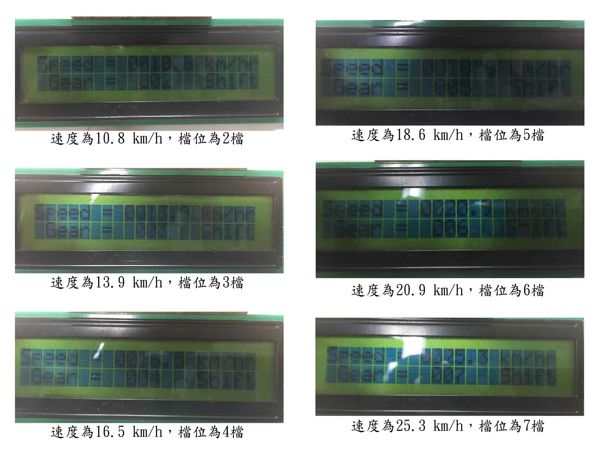
當速度為2.5 km/h時,檔位為1檔,如圖12所示。圖13分別為為速度10.8 km/h時,檔位為2檔、速度13.9 km/h時,檔位為3檔、速度為16.5 km/h時,檔位為4檔、速度為18.6 km/h時,檔位為5檔、速度為20.9 km/h時,檔位為6檔及速度為25.3 km/h時,檔位為7檔。
檔位更換精準度實驗結果:
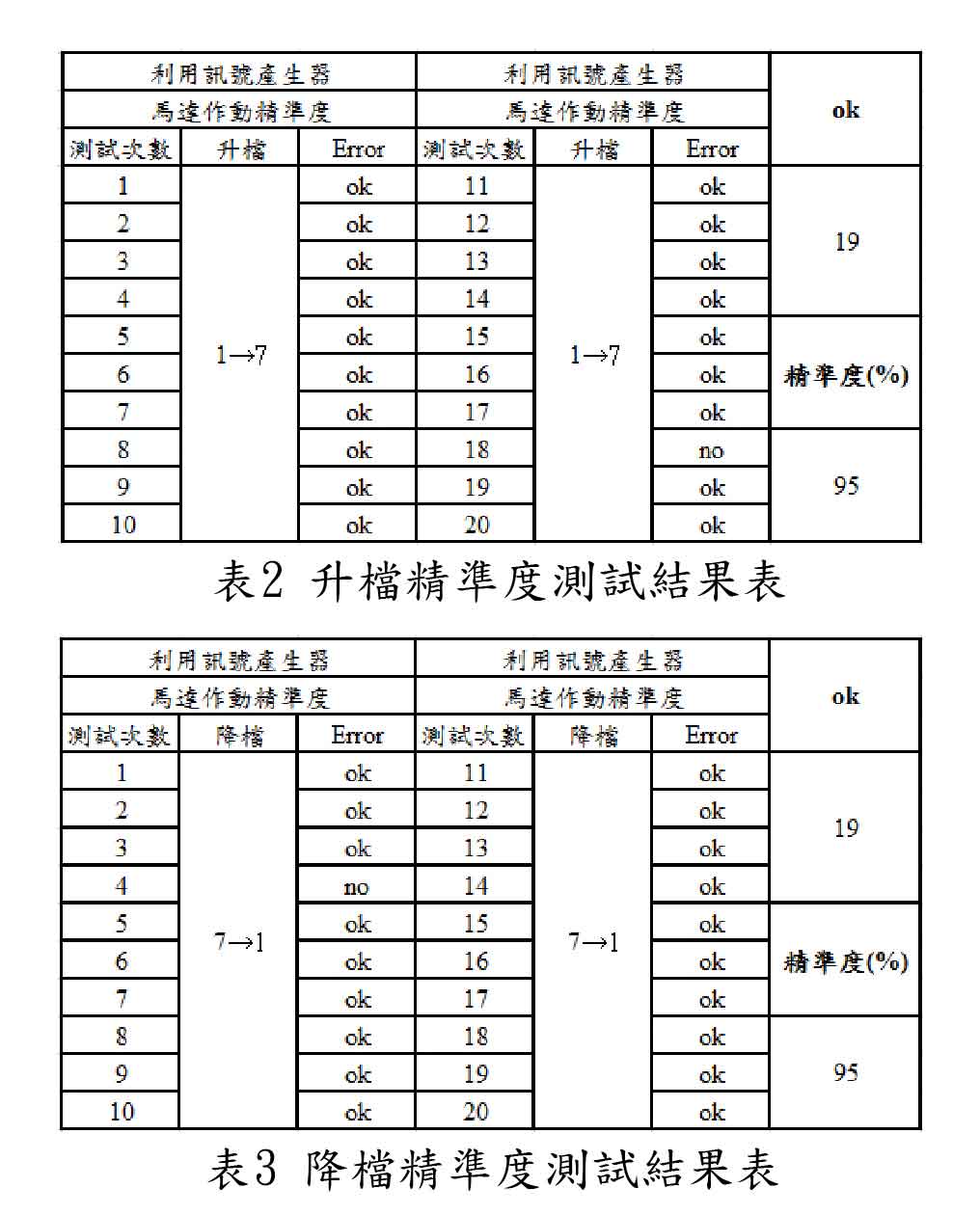
針對升檔與降檔進行檔精準度測試如圖14中的表2與表3所示,測試結果精準度95%可以證明每次檔位更換都是標準的升降檔,20次中一次不OK的原因為升檔與降檔的位置有一點點小誤差是位於可容許誤差中,因此95%精準度是最佳化精準度,並且小誤差中不會影響後續的檔位更換的狀態,其中速度信號來源利用訊號產生器提供。
結論
本文藉由機械減速機構的概念,利用蝸桿蝸輪與步進馬達組成變速機構,因蝸輪蝸桿具有防止逆轉的功能,因此無需持續給予步進馬達電力,所以解決了利用金屬伺服馬達,必須持續給予電力進而導致整體耗電過大的問題,並且也讓拉索距離可以準確達到,以達到較精密控制換檔的位置。
由於現在的自行車還是得依賴使用者做判斷後手動變速去嘗試符合路況,本設計概念期望利用機械與電子概念搭配,可讓自行車的拉索換檔位置,達到精密控制智慧變檔自行車,使內變速器有如傳統式手動變速機構一樣完美換檔,並且可以讓使用者專注於路況的安全及踩踏的運動,而不用再分心操作變速系統。運用踩踏的速度及加速度的技術來判斷是否應該切換檔位,而不需要使用者時時判斷換檔時機,還換不到適合的行駛檔位,以及關注路況與邊換檔位所造成危險的發生。
因此導入自行車自動變速功能,是能夠讓使用者在騎乘自行車時得到更多的舒服感覺及提升在路況騎乘時的安全性,進而獲得現代科技應用於生活上,以及達成降低運動時所造成的運動傷害,並且讓騎乘者享受於此運動所帶來的效果以及安全性。
(作者陳源林1、黃柏文2、洪?姍3、歐幸兒4為明志科技大學機械工程系1教授及2-3學生;本文為第十一屆盛群盃HOLTEK MCU創意大賽複賽報告)
參考文獻
[1] Rob Redfield and M.L. Hull, 〃 On the relation between joint moments and pedaling rates at constant power in bicycling〃, 1986.
[2] M.L. Hull, H.K.Gonzalez and Rob Redfield, 〃Optimization of pedaling rate in cycling using a muscle stress-based objective dunction〃, 1988.
[3] 劉錦松,〃自行車微電腦變速系統〃,國立交通大學機械工程研究所,1994。
[4] CHO, Chang K., et al., 〃An ergonomic study on the optimal gear ratio for a multi-speed bicycle.〃, International journal of industrial ergonomics, 1999, 23.1: 95-100.
[5] Anthony P Marsh, Philip E Martin, David J Sanderson, 〃Is a joint moment-based cost function associated with preferred cycling cadence? 〃, 1999.
[6] C. K. Cho, M. H. Yun, C. S. Yoon and M. W. Lee, “An Ergonomic Study on the Optimal Gear Ratio for a Multi-speed Bicycle”, International Journal of Industrial Ergonomics, No. 23, pp. 95-100, 1999.
[7] 黃有烽,〃騎腳踏車之踏力與速度之最適化研究〃,國立清華大學動力機械工程研究所,2000。
[8] Marsh AP1, Martin PE and Sanderson DJ., 〃Is a joint moment-based cost function associated with preferred cycling cadence〃, 2.000.
[9] 藤井和浩,宇野公二〃腳踏車用變速控制裝置〃,中華民國專利581738,Jun. 28, 2002。
[10] 蔡岳良,〃腳踏車自動變速策略之研究〃,國立交通大學機械工程研究所,2007。
[11] 張峻逢,〃以模糊理論實現一個具有學習功能的自動變速腳踏車系統〃,國立交通大學電控工程工程研究所,2011。
[12] 康富順,〃具學習功能之腳踏車自動變速系統〃,國立交通大學電控工程工程研究所,2011。
[13] 鄭博仁,〃機械式自行車自動變速器之理念設計方法〃,國立臺灣大學機械工程學研究所,2012。
[14] 林芳楚,〃電動助力車行車坡度偵測系統〃,國立交通大學電控工程研究所,2012。
[15] 林金龍,〃電動腳踏車扭力感測器之設計與分析〃,國立臺北科技大學製造科技研究所,2012。
[16] 曾俊諺,〃電動腳踏車之自動變速系統〃,國立成功大學機械工程學系碩博士班,2013。
[17] 樹德科技大學,〃腳踏車自動變速系統〃,中華民國專利 TW M470064 U,2013。
[18] 樹德科技大學,〃腳踏車自動變速系統〃,中華民國專利 TW M477990 U,2014。
[19] 樹德科技大學,〃腳踏車自動變速系統〃,中華民國專利 TW201500259 A,2015。
[20] 李樹,〃智慧型自動變速腳踏車之研究〃,明志科技大學機械工程系機械與機電工程碩士班,2015。