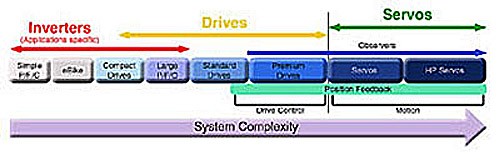
工業動作控制涵蓋了廣泛的應用領域, 範圍從以變頻器為基礎的電扇或是幫浦控制,到以更為複雜的AC(交流)驅動控制的工廠自動化,一直到先進的自動化應用,像是以複雜的伺服控制的機器人等。這些系統需要感測許多的變數,像是馬達繞組電流或電壓、dc(直流)連結電流或電壓、轉子位置以及速度等。變數的挑選以及所需要的量測精確度必須依據終端應用裝置的需要、系統架構、目標系統成本或是系統複雜度而定。還有其它的考量,例如條件監測等的加值功能。據報告指出,馬達消耗的全球電力達40%之多,因此國際法規已經在所有範圍的工業馬達應用上更加著重在系統效率(參照圖1)。
在不同馬達控制訊號鏈拓墣中的電流與電壓感測技術會隨著馬達功率等級、系統性能需求、以及終端應用裝置等而有所不同。在本文中,馬達控制訊號鏈的實現方案會隨著感測器的選擇、電流隔離需求、A/D轉換器的挑選、系統整合度、以及系統的電源/接地分割而有所差異。雖然隔離需求往往會對最終的電路拓墣與架構產生顯著的影響,但是本文將專注在改善電流感測的量測方面(我們視為促進要素之一),藉以實現更具效率的馬達控制系統。
...
...
| 使用者別 |
新聞閱讀限制 |
文章閱讀限制 |
出版品優惠 |
| 一般訪客 |
10則/每30天 |
5/則/每30天 |
付費下載 |
| VIP會員 |
無限制 |
20則/每30天 |
付費下載 |