本文說明如何使編碼器的解析度、精度和可重複性規格,與馬達和機器人系統規格相互匹配,以及設備健康監測、邊緣智慧、穩定可靠的檢測和高速連接如何支援未來的編碼器設計;並探討編碼器應用中電子元件的未來發展趨勢,解釋為何完整的訊號鏈設計是實現新一代馬達編碼器設計的基礎。
從定速馬達轉向提供位置和電流回饋的變速馬達,不僅可以實現製程改善,還能節省大量能源。本文介紹馬達編碼器(位置和速度)、元件類型和技術,以及應用案例。並解答對於特定系統最重要的編碼器性能指標有哪些等關鍵問題。
閉迴路馬達控制回饋系統
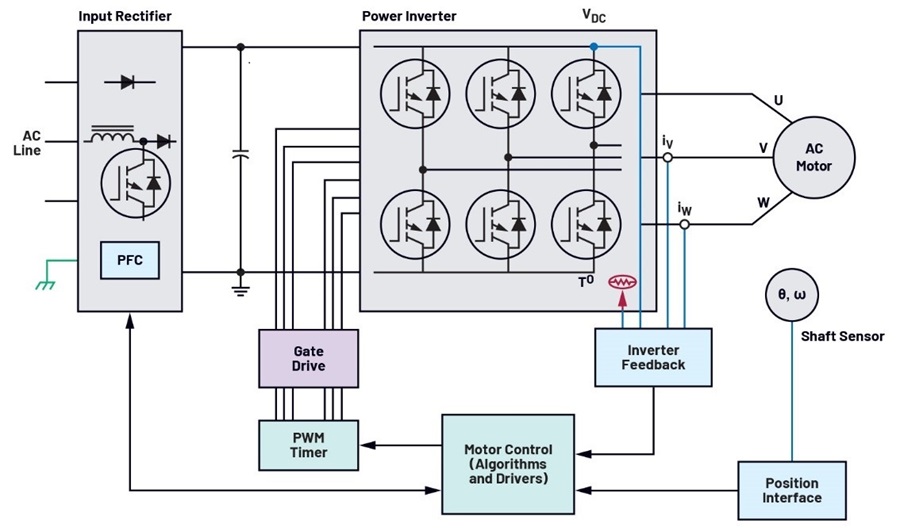
在過去的幾十年裡,從傳統的聯網馬達向逆變器驅動馬達的轉換一直在穩步、持續進行。這是工業旋轉設備的重大轉型,透過提升馬達和終端設備的使用效率,不僅實現了製程改善,還能節省大量能源。變速驅動器和伺服驅動系統提高了馬達控制性能,進而可以改善要求嚴苛應用的品質和同步功能。如圖一所示,功率級使用功率逆變器、高性能位置感測以及電流/電壓閉迴路回饋,因此得以提升馬達性能和效率。
將變頻電壓施加於逆變器採用脈衝寬度調變的馬達,可以實現對馬達的開迴路速度控制。在穩態或緩慢變化的動態條件下相當有效,並且較低性能應用中的許多馬達驅動器採用開迴路速度控制,而不需要編碼器。但是此種方法也有些缺點:
‧ 由於沒有回饋,速度精度很有限
‧ 由於無法優化電流控制,馬達效率很低
‧ 必須嚴格限制瞬態響應,以免馬達喪失同步
什麼是位置編碼器?
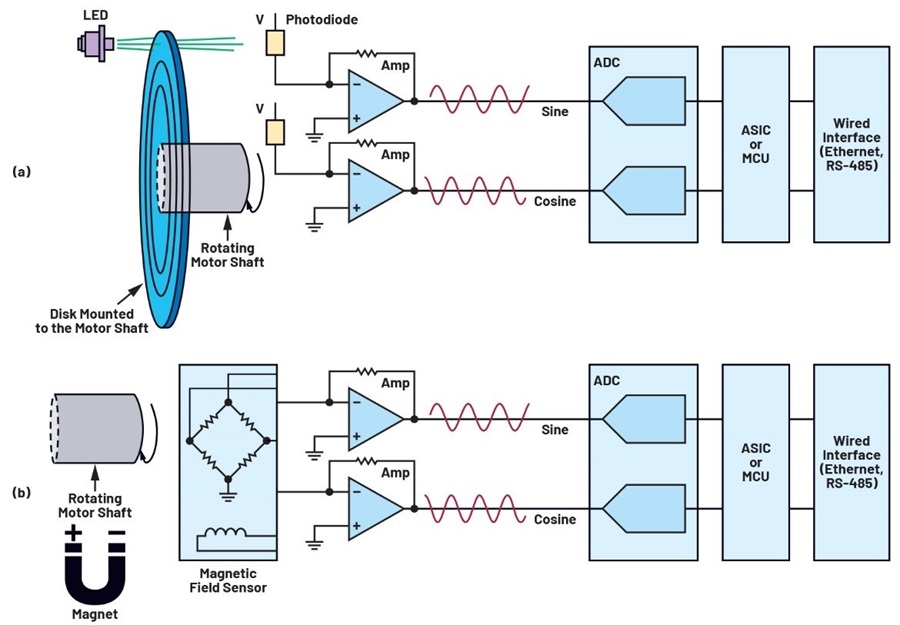
編碼器透過追蹤旋轉軸的速度和位置來提供閉迴路回饋訊號。光學和磁編碼器技術使用廣泛,如圖二所示。
在通用伺服驅動器中,編碼器用於測量軸位置,從中可推導出驅動器轉速。機器人和離散控制系統需要準確且可重複的軸位置。光學編碼器由具備精細光刻槽的玻璃圓盤組成。當光穿過圓盤或從圓盤反射時,光電二極體感測器將感測光的變化。
光電二極體的類比輸出經過放大和數位化處理後,透過有線電纜發送到逆變器控制器。磁編碼器由安裝在馬達軸上的磁體和磁場感測器組成,感測器提供正弦和餘弦類比輸出,輸出經過放大和數位化處理。光學和磁感測器訊號鏈類似。
類型、技術和性能指標
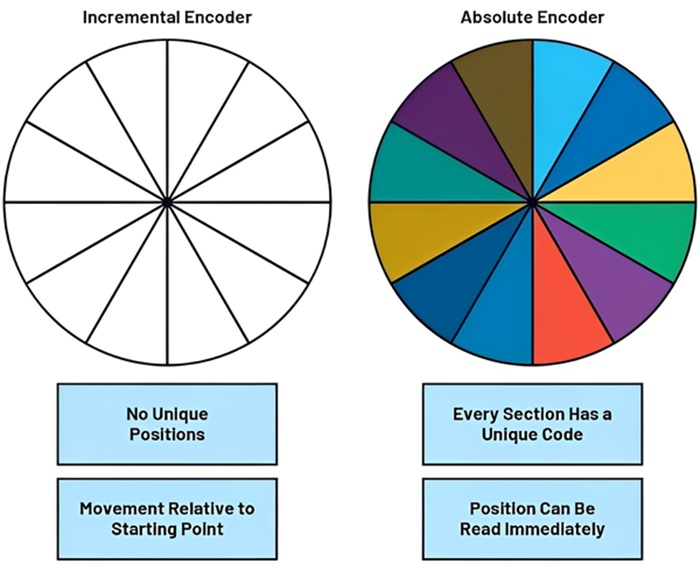
單圈絕對值編碼器在通電後會返回機械或電氣360°範圍內的絕對位置訊號。馬達軸的位置可以立即讀取。多圈絕對值編碼器不僅具有絕對位置功能,而且能提供360°圈數計數。相較之下,增量編碼器則提供相對於旋轉起點的位置。增量編碼器提供一個索引脈衝來指示0°,並提供一個單脈衝來計數圈數,或提供一個雙脈衝來提供方向資訊。
編碼器的解析度是指馬達軸旋轉360°時可以區分的位置數量。通常最高解析度的編碼器使用光學技術,而中高解析度的編碼器使用磁或光學感測器。中低解析度編碼器則使用旋變器(旋轉變壓器)或霍爾感測器。光學或磁編碼器使用高解析度訊號處理。
大多數光學編碼器是增量式的,編碼器可重複性是一項關鍵性能指標,主要可用於衡量編碼器返回到同一指令位置的一致性,這對於重複性任務非常重要,例如在PCB製造過程中,放置半導體所用的機器人或貼片機,必須具有良好的可重複性。
表一:編碼器關鍵性能指標
|
指標
|
定義
|
備註
|
|
解析度
|
編碼器每轉可區分的位置數(n)
|
高解析度:16位元至24位元
中解析度:13位元至18位元
低解析度:<12位元
|
|
絕對精度
|
旋轉一圈後實際位置與報告位置之間的差異(類似於INL)
|
位置控制應用依賴絕對精度
|
|
差分精度
|
兩個相鄰位置之間報告的距離與理想距離之差(類似於DNL)
|
速度控制應用依賴差分精度
|
|
可重複性
|
編碼器返回到同一指令位置的一致性
|
可重複性對於重複性任務很重要,例如涉及機器人的任務
|
精度和可重複性之必要
貼片機/機器人是食品包裝和半導體製造產業中常用的自動化機器,為了提高製程效率,需要具有高精度和可重複性的機器或機器人,而使用高性能馬達編碼器能夠實現高精度、可重複性和高效率。
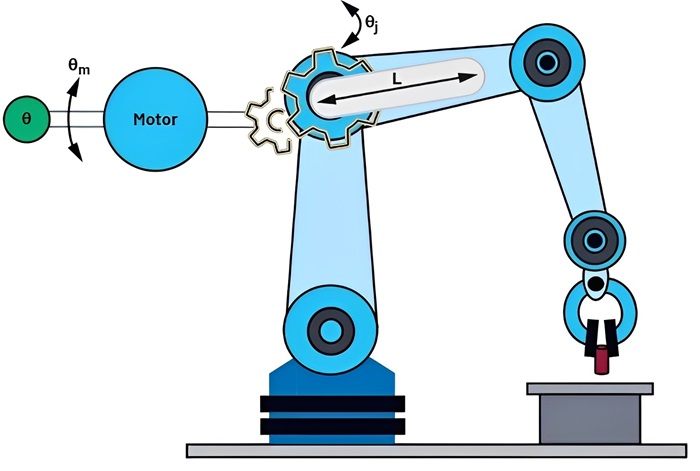
圖四展示機器人中的編碼器應用案例。馬達透過精密減速變速箱驅動機器臂中的每個關節。機器人關節角度透過馬達上安裝的精密軸角編碼器(θm)和機器臂上安裝的附加編碼器(θj)來測量。
機器人的主要性能規格是可重複性,其數量級通常是亞毫米級。在瞭解可重複性規格和機器人的作用範圍之後,就可以推斷旋轉編碼器的規格。
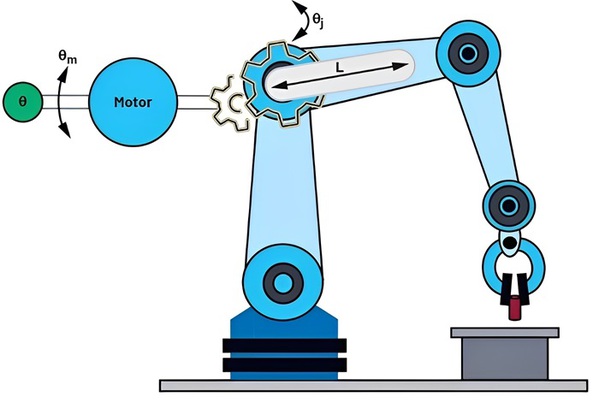
| 圖四 : 馬達編碼器(θm)和關節編碼器(θj)的角度可重複性,以及機器人作用範圍(L)關節編碼器所需的角度可重複性(θ)可從三角函數得出:機器人可重複性除以作用範圍的反正切。 |
|
多個關節結合起來可實現機器人的整體作用範圍。感測器應具有比目標角度精度更高的性能。必須改善每個關節的可重複性規格,在此假設改善10倍。對於馬達編碼器,可重複性由齒輪比(G)定義。
例如,表二所示的機器人系統,關節編碼器需要20位元到22位元的可重複性規格,而馬達編碼器需要14位元到16位元的解析度。
表二:編碼器可重複性和機器人可重複性規格
|
機器人系統
|
機器人1
|
機器人2
|
|
假定齒輪比,G
|
100
|
|
可重複性規格
|
±0.05 mm
|
±0.01 mm
|
|
作用範圍,L
|
1.30 m
|
1.10 m
|
|
編碼器
可重複性
規格
|
θ
|
0.0022°
|
0.0005°
|
|
θj/101
|
0.00022°(~20位元)
|
0.00005°(~22位元)
|
|
θm = θj × G
|
0.02°(~14位元)
|
0.005°(~16位元)
|
|
註1:由於機器人作用範圍由多個關節共同體現,因此單個編碼器必須具有更高的精度才能實現整體系統精度。
|
未來技術發展趨勢
圖五說明編碼器的未來發展趨勢和實現這些趨勢的技術。
Rockwell關於伺服驅動器、編碼器和編碼器通訊連接埠的研究顯示,用於回饋通訊的收發器每年成長20%。支援透過兩條線(IEEE 802.3dg標準100BASE-T1L)1進行100 Mbps通訊的單對乙太網路(SPE)收發器目前則正在研究中,未來的編碼器驅動介面將受益於低延遲,目標性能為?1.5 μs。此種低延遲將支援更快的回饋資料獲取和更短的控制迴路回應時間。
對機器人和旋轉機器(例如渦輪機、風扇、泵和馬達)進行的狀態監測會記錄與機器的健康和性能相關的即時資料,以便針對性地進行預測維護和優化控制。在機器生命週期的早期進行針對性的預測維護,可以減少生產停機的風險,進而提高可靠性、明顯節約成本和提高工廠的生產率。
將MEMS加速度計放置在編碼器中可提供機器的振動回饋,這適合品質控制非常重要的應用。而將MEMS加速度計增加到編碼器中會很方便,因為編碼器具有現成的佈線、通訊和電源,可以向控制器提供振動回饋。在數控(CNC)機床等應用中,從編碼器發送到伺服器的MEMS振動資料可用於即時優化系統性能。
使用CbM並結合穩健且壽命更長的位置感測器,可以延長工業資產的使用壽命。磁感測器產生指示周圍磁場角位置的類比輸出,可以取代光學編碼器。磁編碼器可用於濕度較高、污垢嚴重和灰塵較大的區域。這些惡劣的環境會影響光學解決方案的性能和使用壽命。
對於機器人和其他應用,必須始終清楚機械系統的位置,哪怕在斷電的情況下也要明確知曉。標準機器人、協作機器人和其他自動化裝配設備在運行過程中突然斷電後,需要重新歸位元並初始化電源,這些停機時間會帶來一定的相關成本並導致效率低下。由ADI開發的磁性多圈記憶體不需要外部電源,也能夠記錄外部磁場的旋轉次數,因而可以縮減系統尺寸並降低成本。
對於機器人和協作機器人,馬達編碼器和關節編碼器通常需要16位元至18位元ADC性能,在某些情況下需要22位元ADC。有些光學絕對位置編碼器也需要高達24位元解析度的高性能ADC。
馬達編碼器訊號鏈
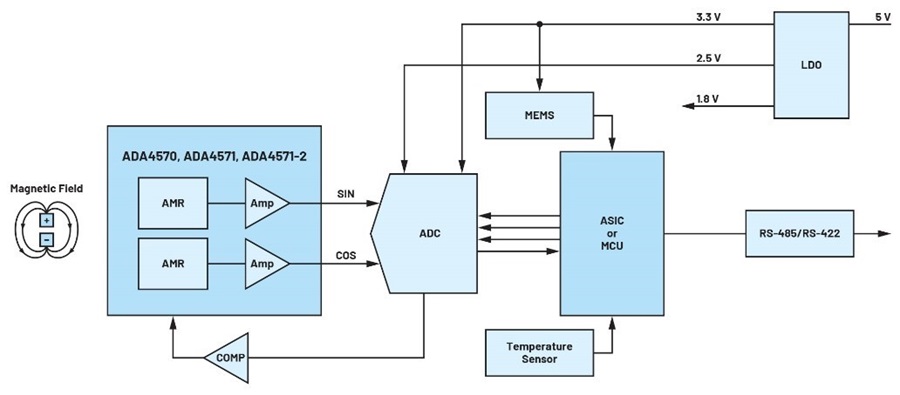
圖六至圖九展示磁性(各向異性磁阻(AMR)和霍爾技術)、光學和旋變編碼器的編碼器訊號鏈。主要元件分為五大類:
1. 使用磁感測器(AMR、霍爾)追蹤軸位置和速度
2. 設備健康狀況監測:(a)MEMS感測器;(b)溫度感測器
3. 智能:(a)具有/不具有整合ADC的微控制器;(b)旋變數位轉換器(RDC)
4. 電纜介面:(a)高速RS-485/RS-422收發器;(b)SPI轉RS-485擴展器收發器
5. 訊號處理:(a)高性能ADC(12位元至24位元解析度);(b)磁編碼器(AMR)
感測
在磁位置感測器應用領域,AMR感測器兼具穩定可靠的性能和高精度,感測器通常位於安裝在馬達軸上的偶極磁體對面(圖六)。
AMR感測器對磁場方向變化很敏感,而霍爾技術對磁場強度很敏感。所以感測器對系統中的氣隙和機械公差變化具有很強的容忍度。此外,AMR感測器的工作磁場沒有上限,因此,此種感測器在高磁場下工作時幾乎不受雜散磁場的影響。
ADA4571 為一款低延遲整合訊號處理功能的AMR感測器,提供單端類比輸出,此單晶片解決方案提供良好的角度精度(典型角度誤差僅為0.10度),工作速度可高達50k rpm。ADA4571-2是雙通道版本,可提供完全備用能力而不影響性能,適合安全關鍵型應用。
ADA457x系列提供的高角度精度和可重複性改善閉迴路控制,降低馬達扭矩漣波和雜訊。相較於競爭技術,單晶片架構提高可靠性,減少尺寸和重量,並且更易於整合。
訊號處理和電源
AD7380 4 MSPS雙通道同步採樣、16位元SAR ADC具有許多系統級優勢,包括節省空間的3 mm × 3 mm封裝,適用於空間受限的編碼器PCB板。4 MSPS吞吐速率確保擷取到正弦和餘弦週期的詳細資訊,以及最新的編碼器位置資訊。高吞吐速率支援進行晶片內過採樣,進而縮短數位ASIC或微控制器將準確的編碼器位置回饋給馬達時的時間延遲。
AD7380晶片內過採樣可以額外增加2位元解析度,進而與晶片內解析度增強功能輕鬆配合使用。AD7380 ADC的VCC和VDRIVE以及放大器驅動器的電源軌可以由LDO穩壓器供電。ADP320、LT3023和 LT3029 等多路輸出低雜訊LDO可用來為訊號鏈中的所有元件供電。
收發器
ADM3066E RS-485收發器具備超低的發送器和接收器偏斜性能,所以非常適合用於傳輸精密時鐘,EnDat 2.2 4等馬達控制標準通常要求精密時脈。事實證明,ADM3065E在馬達控制應用中採用典型電纜長度的確定性抖動小於5%。ADM3065E具有較寬的電源電壓範圍,因此此種時序性能水準也可用於需要3.3 V或5 V收發器電源的應用。
微控制器
對於需要12位元或更低解析度的應用,可以用整合ADC的微控制器來代替AD7380 ADC。小巧的MAX32672超低功耗Arm Cortex-M4F微控制器,包含一個12位元1 MSPS ADC,具有增強的安全性、周邊和電源管理介面。
資產狀況監控
ADXL371為一款超低功耗、3軸、數位輸出、±200g微機電系統(MEMS)加速度計,適用於機器監控。ADXL371性價比高,採用小型3 mm × 3 mm封裝,工作溫度高達+105°C。在即時導通模式下,ADXL371消耗1.7 μA的電流,同時能持續監測環境影響。當檢測到衝擊事件超過內部設定的閾值時,元件會切換到正常工作模式,其速度非常快以便記錄事件。
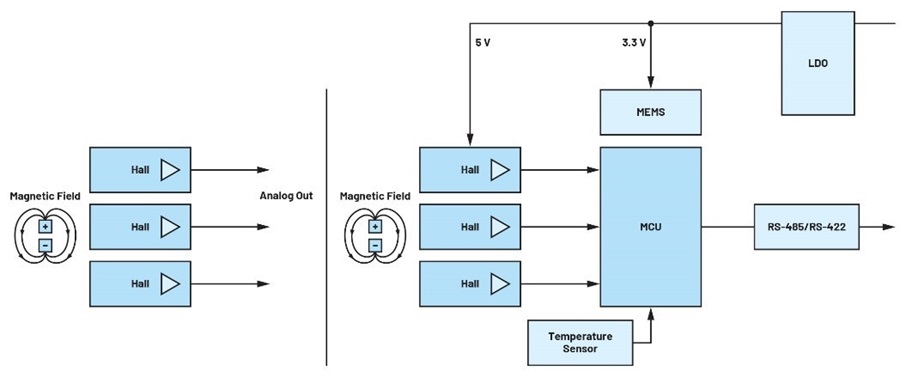
磁編碼器(霍爾)
可以使用AD22151或 AD22151G 設計霍爾編碼器。AD22151G為一款線性磁場感測器,其輸出電壓與垂直施加於封裝上表面的磁場成比例。為了設計編碼器系統,將等間距的磁體放置在旋轉馬達軸上。當旋轉軸磁體經過霍爾感測器時,感測器輸出的電壓達到峰值。使用更多磁體或感測器可以獲得更高的解析度。霍爾效應編碼器可以使用MAX32672和ADM3066E以支援有線介面。ADXL371 MEMS和ADT7320可為惡劣的編碼器環境提供狀態監測。磁編碼器(AMR)部分則提供有關這些訊號鏈元件的更多資訊。
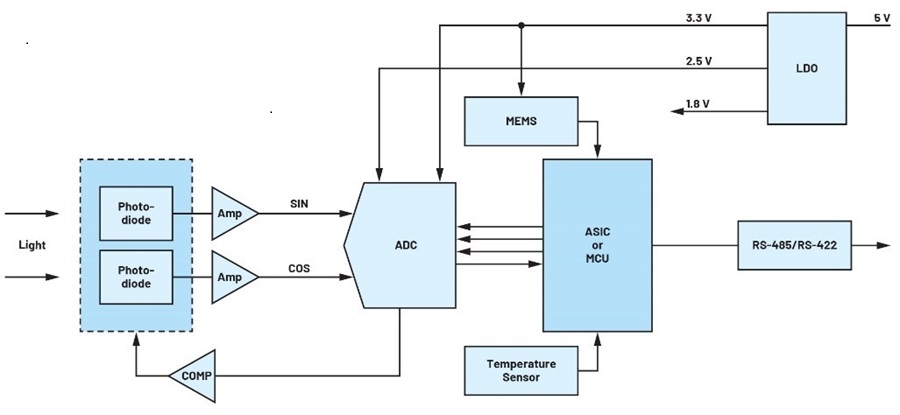
光學編碼器
光學編碼器訊號鏈元件與磁編碼器(AMR)部分介紹的元件幾乎相同。但是,為了支援更高的編碼器解析度,建議使用 AD7760 2.5 MSPS、24位元、100 dB Σ-Δ ADC,其融合寬廣輸入頻寬、高速特性和Σ-Δ轉換技術的優勢,2.5 MSPS時訊號雜訊比(SNR)可達100 dB,因此適合高速資料擷取應用。
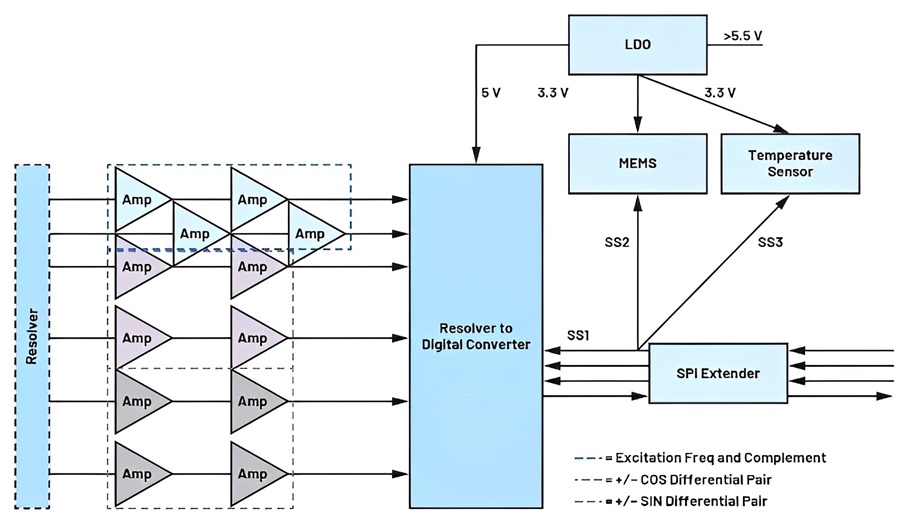
旋變(耦合)編碼器
旋變編碼器具有一些優點,例如較高的機械可靠性和高精度;但相較於磁體和ADA4571,旋變器價格更為昂貴。AD2S1200 將來自旋變器的訊號轉換為數位角度或角速率。圖十顯示旋變器訊號鏈。兩個放大器用於創建三階巴特沃斯低通濾波器,以將旋變器訊號傳遞到AD2S1200。
為節省空間並降低設計複雜性,LTC4332 SPI擴展器可支援系統磁碟分割,提供了將微控制器置於伺服器中而非編碼器中的選項。如果編碼器需要微控制器,可以使用MAX32672 SPI介面直接連接AD2S1200,並且可以用ADM3065E RS-485收發器取代LTC4332。
如果使用LTC4332,AD2S1200 SPI輸出會轉換為穩健的差分現場匯流排界面。LTC4332包括三條從機選擇線,因此MEMS和溫度感測器等額外感測器可以與AD2S1200連接到同一條匯流排上。
ADI協助合作夥伴設計未來工業馬達編碼器和網路。利用小巧而強大的微控制器、ADXL371 MEMS加速度計和ADT7320溫度感測器,可以輕鬆將資產健康洞察能力整合到編碼器中。相較於光學或旋變器感測解決方案,ADI先進的AMR磁感測器(如ADA4571)提高可靠性,減少尺寸和重量,並且更易於整合到編碼器中。採用AD7380或AD7760等中高階ADC可實現貼片機和機器人所需的高精度和可重複性。
(本文作者Richard Anslow為ADI資深系統工程經理)