本文敘述部分意法半導體MEMS感測器中具有可程式化的嵌入式功能,尤其是有限狀態機(Finite State Machine ;FSM)、機器學習核心(Machine Learning Core;MLC)和智慧感測器處理單元 (Intelligent Sensor Processing Unit;ISPU)。
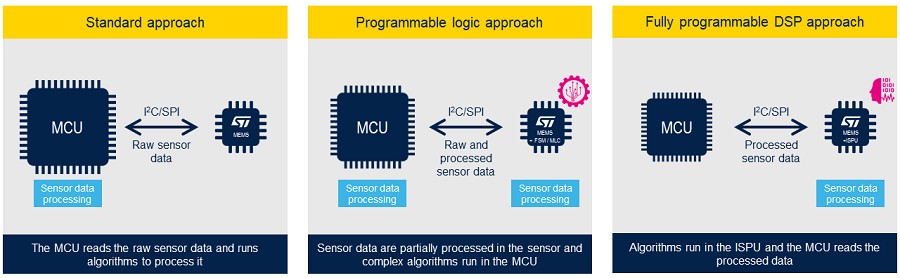
意法半導體(STMicroelectronics;ST) 資料處理的方式由原本以感測器持續串流資料至微控制器進行處理與分析的標準解決方案,變更為由感測器本地處理資料的邊緣方法。
ST 近期推出不同的 MEMS 感測器,其採用可程式化邏輯和完全可程式化的 DSP 架構以降低耗電量、I2C/SPI 匯流排上的流量,並卸除微控制器的負載壓力。
‧ 可程式化邏輯架構的目標是在特定處理模型上達到最低耗電量,因此工程師可以執行 FSM 和 MLC 演算法。觸發中斷時,微控制器會讀取模型輸出結果和原始資料。
‧ 完全可程式化的DSP執行任何自訂程式碼(基於運算和編譯器限制),並在感測器中運行,而微控制器則會讀取感測器傳送出來的處理資料。
有限狀態機(FSM)
有限狀態機是一種行為模型,由有限數量之狀態和狀態間的特定轉換所組成,這些狀態就如同可搭配感測器中樞設定以處理內部和外部資料的流程圖表,工程師也可以同步執行多個狀態機。
有限狀態機適用於任何需要辨識使用者定義手勢模式的應用。
支援 FSM 的最新 ST 感測器隨附自我調整配置(Adaptive Self-Configuration;ASC)。這代表 FSM 中斷可用於觸發裝置設定變更(包括 ODR、FS、BW、電源模式和 FIFO),因此微控制器可以持續處於睡眠模式。
機器學習核心(MLC)
機器學習核心是由一組可設定的參數與決策樹組成。決策樹是以二元樹狀結構呈現,並由內部節點和葉節點等兩種節點所構成。樹狀結構的內部節點分為兩個子節點,後接 if-then-else 方法,以接續 true 或 false 的下一個路徑。決策樹的葉節點是一種不會有任何子節點的節點,並且包含其中一個使用者定義的「結果」類別。
如果某個應用可遵循歸納方法實作,且這類歸納方法包含藉由觀察搜尋出模式,就很適合此方法。包括如下應用:活動辨識、健身活動辨識、動作強度偵測、振動強度偵測、攜帶位置辨識和情境感知。
智慧感測器處理單元(ISPU)
ISPU 是小巧、超低功耗且高效能的可程式化核心,以ST開發的專屬架構為基礎。此核心可處理如加速度計、陀螺儀和溫度等內部和從感測器中樞連接至感測器的外部資料。ISPU則可執行由 ST ISPU 工具鏈編譯的 C 語言演算法,或者可透過 NanoEdge AI Studio 產生異常偵測AI程式庫。可靈活地進行程式化,是無需微控制器即可實作任何 AI、感測器融合演算法的理想裝置。