建立軟體模型進行產品設計開發(Model base design;MBD)已是目前產品開發趨勢所在,不僅可加速開發速度也可降低開發成本。對於馬達開發更是扮演著舉足輕重的角色,馬達除了電機本體設計之外,連接的驅動方式也是決定馬達性能的重要因素。
一般常見的驅動方式可分成弦波驅動與六步方波兩大類,相對應的馬達反電動勢也有弦波(Sinwave)及梯型波這兩種。藉由Altair公司發行的電磁分析軟體Flux與系統開發平台activate進行四種不同搭配的扭力差異分析,可以節省實際實驗所需的經費與時間。
直流無刷馬達與伺服馬達
直流無刷馬達(BLDC)與伺服馬達(Servo motor)在馬達本體結構上十分相似,皆是繞線定子加上磁石轉子組合,最大的差異在於馬達反電動勢(back EMF)波形,BLDC為梯型波,而伺服馬達大多為弦波。
除了馬達本體上的差異之外,BLDC的轉子位置偵測採用的是霍爾元件(Hall Sensor),對應的驅動方式為六步方波(six step square wave)驅動且大多為開迴路(open loop)控制,常應用在風扇等領域。
然而伺服馬達轉子位置偵測使用的是編碼器(encoder),驅動大多為弦波驅動加上閉迴路控制,常應用在需精準定位,穩定速度或固定扭力的領域。表1為兩種馬達的整理表格。
表1
|
|
直流無刷馬達
|
伺服馬達
|
|
結構
|
繞線定子,磁石轉子
|
|
反電動勢波形
|
梯型波
|
弦波
|
|
轉子位置偵測
|
霍爾元件
|
編碼器
|
|
驅動模式
|
六步方波
|
弦波
|
|
控制方式
|
開迴路
|
閉迴路
|
|
應用領域
|
風扇
|
精準定位、穩定速度、固定扭力
|
Flux與Activate建模
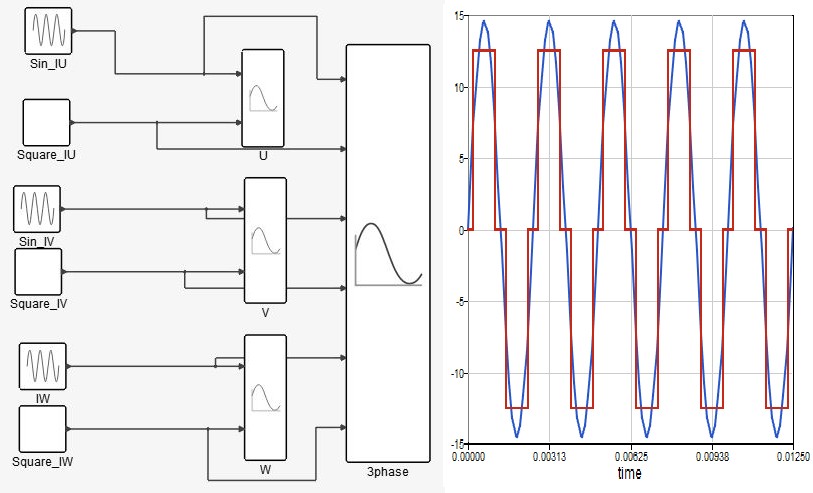
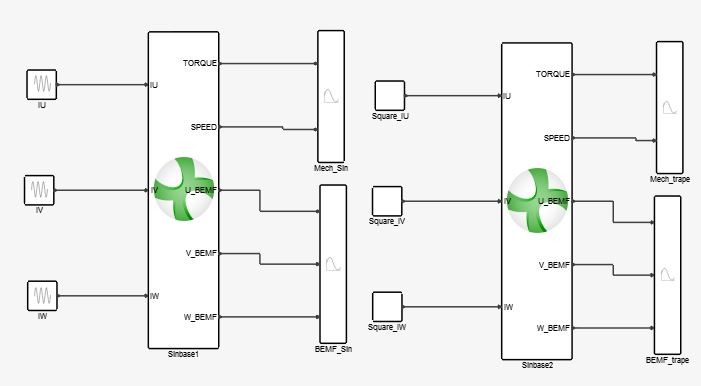
弦波與六步方波皆有對應的理論公式,在系統開發平台activate上輸入公式可快速實現電流波形(圖1),再建立反電動勢波形即可觀察搭配的扭力輸出結果。不僅縮短了理論推導結果的時間,更可搭配電磁分析軟體Flux建立的8極9槽直流無刷馬達與伺服馬達模型(圖2),將驅動與電機一同整合在系統開發平台activate。達成初步的機(馬達)電(驅動)整合,進而觀察更接近實際狀況的輸出扭力模擬結果。
模擬結果與比較
圖3為電源與馬達在Activate平台建立的模型,驅動電流輸入馬達後,在Flux內進行扭力分析模擬,並非是扭力理論公式計算,更接近實際馬達性能。兩種電流波形搭配兩種馬達,最後有四種扭力結果,將扭力波形的增益值與漣波整理於表2,可見弦波搭配弦波,方波搭配梯型波可以得到穩定的扭力輸出,扭力方均根(rms)值相似,此一結果跟我們常見的伺服馬達弦波驅動,BLDC搭配六步方波結果相同。伺服電機搭配六步方波不僅有較大的扭力漣波,扭力方均根值(rms)也較小,是相對不利的組合。
然而BLDC搭配弦波驅動可得到較大的扭力方均根值(rms),並且也不會有過大的扭力漣波產生,為十分有利的組合搭配,為了解釋此一現象,將藉由Flux內的細步分析來探究原因。
表2
|
|
伺服馬達+
弦波驅動
|
直流無刷馬達+
六步方波
|
伺服馬達+
六步方波
|
直流無刷馬達+
弦波驅動
|
|
扭力rms值(N*m)
|
14.3
|
13.5
|
15.4
|
16.4
|
|
扭力漣波
(%)
|
0.7
|
5.5
|
6.5
|
2.6
|
線電壓與相電壓
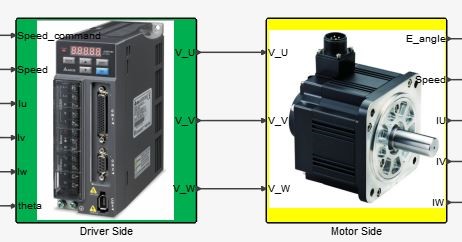
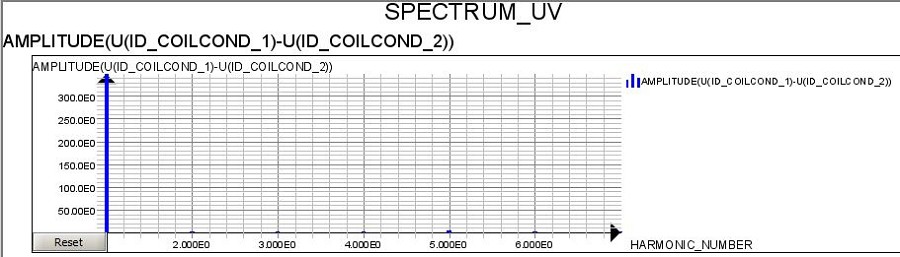
為了探究BLDC搭配弦波驅動的有利結果,必須由馬達與輸入電流的關係看起。驅動器與馬達連接方式如圖4,實際上對應的是線(端子間)並非單相(U,V,W),所以要觀察的馬達反電動勢為線(端子間)反電動勢。在Flux模型內建立線反電動勢觀察,將其波形進行快速傅立葉分析(FFT)。
圖5的線反電動勢分析結果可見幾乎沒有高階諧波項目,相當於完美的弦波波形。馬達的相反電勢波形為梯形波但線反電動勢波形為弦波,當搭配的為弦波電流源時,實際上為弦波搭配的組合,說明了為何扭力漣波較小的根本原因。
結論
藉由MBD方式在實體測試之前即可預測測試結果,可大幅降低測試的費用與時間。試想僅販售驅動器廠商,對接不同類型的馬達,採用MBD方式可在客戶測試前提出可能預見的測試結果,避免爭議發生。對於販售馬達廠商也是如此,對應不同驅動方式馬達會有不同性能表現。MBD可以在設計馬達時,就將驅動的影響納入,不僅節省成本更可累積公司的軟實力。
近期日益火熱的電動載具產業,馬達跟驅動皆會一併開發,使用MBD可將測試可能出現的問題在模型上預先顯示。然而並非僅有馬達會受驅動影響特性,馬達特性的變化也會影響驅動端的演算,所以驅動與馬達的雙向聯合模擬日益重要,將PID控制、dq軸轉換、閉迴路控制整合於Activate驅動模型,再於Flux模型進行雙向耦合,達到digi twins的目標。
(本文作者陳志豪為祐謙科技電機顧問)