歐洲新車評估計劃(NCAP)最近更新雷達標準,最新的第79號條例規定雷達在盲點偵測和變換車道輔助中的最小車距和最低行駛車速,目的是改善新車的駕駛員輔助功能。
歐洲新車評估計劃 (Euro NCAP) 最近更新雷達標準,目的是改善新車的駕駛員輔助功能。NCAP 標準因地區而異;美國的 NCAP 由美國國家公路交通安全管理局 (NHTSA) 管理,全球 NCAP 是集中式組織。不過,所有組織都有相同的目標:制定強化汽車和駕駛安全的標準。這些組織提供 0 至 5 顆星的評等,藉以協助消費者做出明智的新車購買決定。
長久以來,Euro NCAP 率先制定許多提高全球汽車業界規格的標準。最新第 79 號條例規定雷達在盲點偵測和變換車道輔助中的最小車距和最低行駛車速。
對於雷達,「最小車距和最低行駛車速」(第 5.6.4.8 節) 有助於找到允許 C 類 ACSF 執行變換車道操作的最低行駛車速 Vsmin 以及雷達可以支援的最小車距 Srear。換句話說,這有助於確定盲點偵測雷達感測器應該在 20km/h 的最低行駛車速下偵測到 C 類 ACSF 進行 LCM 的車距。
變換車道更安全
安全變換車道操作是指後方來車有足夠的時間做出反應 (減速) 而始終保持兩車之間的安全行駛車距。R79 條例 (在第 5.6.4.7 節中) 特別將本車的可能的變換車道操作界定為臨界,變換車道操作開始後 0.4 秒,目標車道上的後方來車必須以高於 3m/s2 的車速減速,藉以確保兩車之間的車距絕對不會小於本車在 1 秒內行駛的車距。
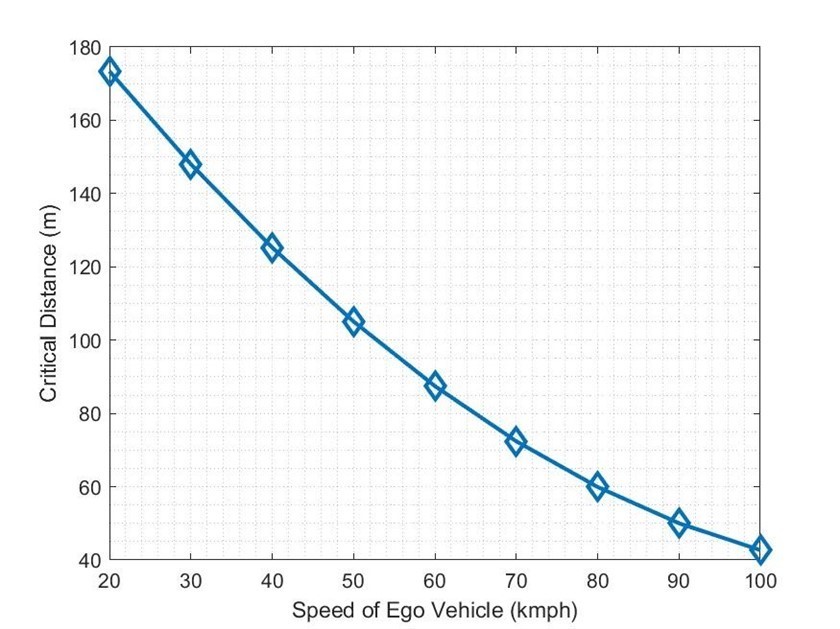
藉由瞭解後方來車的車距和車速以及本車的車速,可以計算變換車道開始時兩車之間的臨界車距 Scritical (第 5.6.4.7.1 節)。如果兩車之間的操作開始時的車距小於 Scritical,則不允許進行變換車道操作。圖 1 將 Scritical 繪製為本車車速的函數。請注意,對於 20kmph 的本車車速,臨界車距接近 180m。
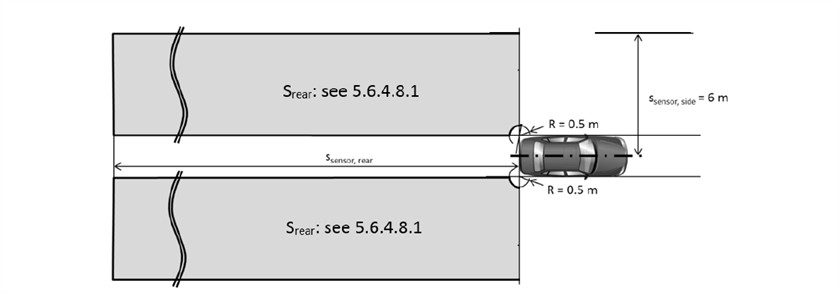
因此,偵測後方來車並估計車距是有效變換車道的關鍵。條例第 5.6.4.8 節規定,各家製造商都必須聲明車輛能夠確實偵測到相鄰車道後方來車的最小車距 (Srear) (條例規定使用兩輪車測試 Srear)。依據聲明的Srear,條例隨後界定最低行駛車速 (Vsmin),這是本車可以變換車道的最低車速,後方來車的車距為Srear,車速為130 kmph,如圖 2 所示。
| 圖2 : NCAP 條例對於車速和車距的規定。(source:聯合國第 79 號條例) |
|
對於本車未偵測到相鄰車道有後方來車的情況,條例做出最劣情況假設,亦即未偵測到在車距 Srear 處有車速 130kmph 的後方來車。因此,車速低於 Vsmin 時不允許變換車道。不過,如果本車在小於 Srear 的車距處偵測到後方來車目標,則能夠以小於 Vsmin 的車速變換車道,前提是車距並非臨界 (亦即後方來車和本車之間的車距超過 Scritical (如 5.6.4.7.1 界定))。
AWR2944是新款單晶片角落雷達感測器,可供汽車製造商符合上述NCAP安全規定。這透過第4組發射器發揮絕佳的角落雷達性能和同級最佳的 RF 性能,角度解析比傳統的 3 個發射器裝置高33%。圖4為一些應用實例條件的測試結果:
毫米波雷達感測器符合 NCAP 規定
藉由偵測更遠車距的高解析度雷達,汽車可以更迅速感測後方來車,並偵測更大的車距,藉以更安全變換車道並通過交叉路口。透過協助汽車製造商滿足最新的 NCAP 安全規定,TI 的角落雷達可以提升全球駕駛安全性。
(本文由Adeel Ahmad、Jitendra Gupta、Sandeep Rao 和 Bhavin Kharadi 共同撰寫)