人工智慧應用的市佔率穩步成長。為此,意法半導體提供廣泛的產品組合,輕鬆實現多級別的人工智慧應用。
在本文中,將主要關注新型感測器中內嵌的MLC(機器學習核心),並闡述如何利用此AI核心開發極低功耗的「邊緣到邊緣」AI應用。
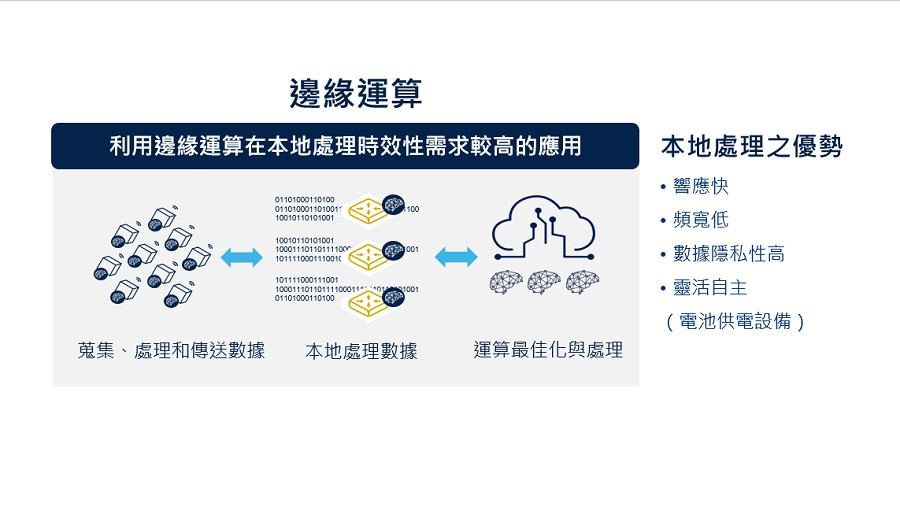
先從以下問題開始:什麼是邊緣人工智慧?在過去,AI應用需要許多計算資源,因此,來自感測器的資料必須傳輸到雲端處理,然後再將結果傳送回本地。整個過程既耗時又耗電,並且不適用於缺乏網路連線的情境。因此,邊緣人工智慧應運而生。有了微控制器(MCU)上的專用硬體,AI處理能力越來越強,將AI核心自雲端移到了本地MCU,使延遲和功耗方面的表現更加出色。
意法半導體近期推出之全新感測器系列(以字母X為結尾的命名)使感測器能夠完全在感測器核心中運行AI演算法(決策樹分類器),而無需本地MCU承擔任何運算。進一步推動了「邊緣人工智慧」技術的發展。為此,我們稱之為「邊緣到邊緣」人工智慧。
假設設計人員有興趣開發一款應用,該應用使用感測器資料(來自加速度計、陀螺儀等)並利用AI偵測人類活動(如步行、跑步、靜止等)或進行手勢辨識。在基於雲端的AI解決方案中,需要將資料發送到雲端進行推理,等待一段時間後獲得回應。這意味著不得不在資料傳輸方面耗費大量能量(如果網路連接可用,最高50mA),而且在接收輸出結果時會經歷相當長的延遲。一種創新型解決方案可以利用MCU來處理資料(“邊緣人工智慧”),但利用感測器資料傳輸仍是必須的。如果您的目標是最低功耗型解決方案,在感測器內部嵌入MLC是最佳選擇。從感測器到MCU的資料傳輸沒有功率消耗,優化後的ASIC使MLC核心的電流消耗限制在~10uA左右,而延遲更可以忽略不計。
回到應用本身,這意味著感測器可以自己運行行為辨識或手勢辨識應用:您只需對MLC感測器進行程式設計,打開感測元件,將基於AI的場景分類結果作為簡單的register value輸出,以供應用MCU進行決策(例如,改變應用的行為,開啟或關閉低功耗模式,等等)。
如前所述,感測器的AI基於決策樹分類器。不同的裝置具有類似的MLC可用資源,每個感測器都能並行運行最多8個不同的決策樹(共256或512個節點)。
決策樹基於訓練過的AI模型(監督學習),需要資料集來訓練模型。最後再將決策樹程式部署到感測器MLC中。針對這5個關鍵步驟,意法半導體提供UNICO-GUI工具,引導開發人員進行資料蒐集、程式產生,並在感測器中上傳程式實現MLC。
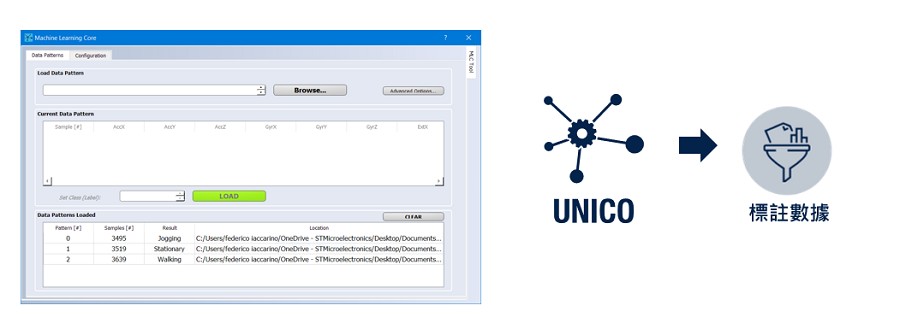
第一步是數據蒐集。設計人員可以選擇意法半導體的開發板蒐集數據,我們建議使用FP-SNS-DATALOG1硬體蒐集資料,確保所蒐集資料的格式與一致性。一旦資料準備完成,就可以啟動UNICO-GUI。
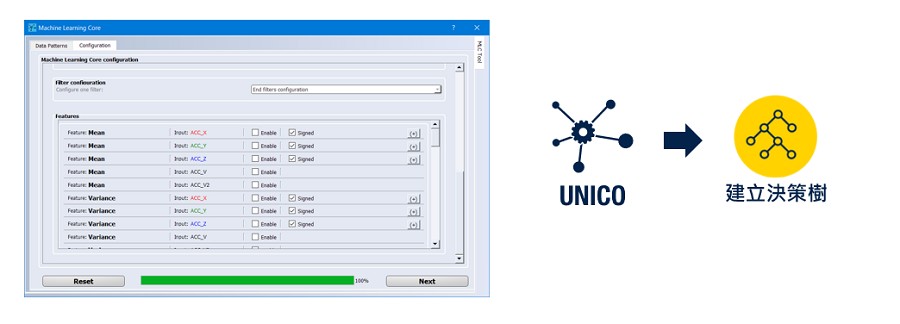
在UNICO-GUI中執行的第二步是標註數據和特徵配置,為所蒐集的資料集分配一個名稱或標籤。決策樹模型會基於設計人員資料集和所選之特徵進行訓練,以區分所選的類別。UNICO-GUI工具可以導入許多類型的資料集。此外,使用者還可以在數據蒐集階段定義感測器的工作模式,其中最重要的是選擇為決策樹分類所用的特徵值。特徵值基本上是對感測器資料進行的一種「分析」,決策樹將使用特徵來選擇類別。舉如,使用XL訊號的「標準差」或「峰對峰值」特徵來判斷使用者是靜止狀態還是運動狀態。顯然,有許多特徵可以組合在一起,以實現符合應用的最佳決策樹。如需更多關於特徵選擇和理解決策樹創建過程的詳細資訊,請參見ST Design Tip 0139。
在UNICO-GUI中執行的第三步是構立決策樹,該步驟生成初始設定並分析訓練集的限制,以構建一個能夠辨識動作行為的決策樹。
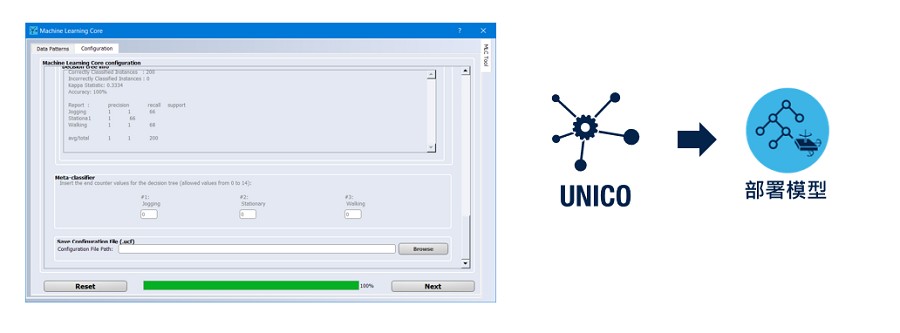
在UNICO-GUI中執行的第四步是感測器程式生成。一旦建立了決策樹,需要用感測器MLC語言「翻譯」決策樹。使用者將得到一個檔案,其中包含在內建MLC的ST MEMS感測器執行應用的所有內容。
最後(第五步),當裝置完成程式設計後,可以在應用中利用經訓練的決策樹來執行MLC的結果。
更多關於MLC在MEMS感測器中的應用,可以參考ST MLC網頁或ST MLC GitHub,這些網頁提供大量應用和配置範例,可以引導設計人員一步一步地完成從資料蒐集到MLC即時功能檢查的整個過程。