為電動車的設計選擇適合架構時,工程師需要考慮許多選項以及對應的權衡而具有一定的挑戰性,亦顯示出針對開發架構及流程進行系統模擬的重要性。本文展示MATLAB、Simulink和Simscape如何支援七種常見的電動車模擬案例。
設計電動車的時候,工程師需要選擇出適當的能源儲存技術與最小化動力系統(powertrain)的耗損來取得性能表現與能源效率之間的平衡。這和其他的重要任務都會需要可以貫穿從動力總成架構的選擇到嵌入式軟體測試這整段開發流程的物理系統模擬。
本文將展示MATLAB、Simulink和Simscape如何支援七種常見的電動車模擬案例:
一、探索電動的動力系統架構
二、調整再生式制動演算法(regenerative braking algorithms)
三、變更懸吊設計
四、優化車輛性能
五、開發主動式底盤控制(active chassis controls)
六、檢驗ADAS演算法
七、進行硬體迴圈(hardware-in-the-loop;HIL)測試
探索電動的動力系統架構
為電動車的設計選擇適合架構時,因為需要考慮許多選項以及對應的權衡,而具有一定的挑戰性。其架構可能包含了一兩個或者更多個電動馬達;一個燃燒發動機(combustion engine);各種動力的來源。每一架構需要透過多種準則來評估,像是範圍、加速、性能與價錢。模擬可以幫助測試在山丘與賽道、以及走走停停等交通情境,來完成各個候選架構的評估。
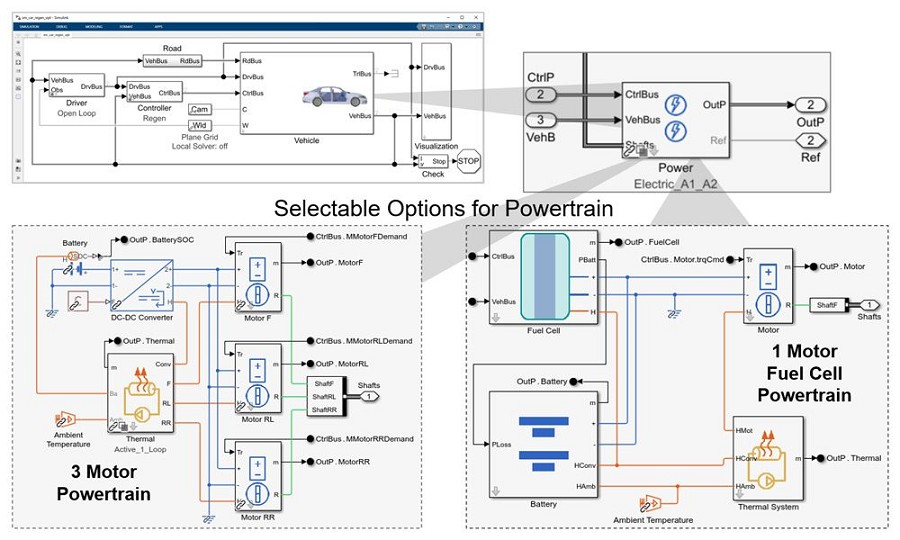
在Simscape,子系統之間的接合為代表機械軸承(mechanical shafts)、電線,或管線內的液體的物理連接。物理系統的模型以圖表視覺化地傳達系統是如何相連。因此可以嘗試各種配置?例如將帶有三個馬達與一個電池的動力系統替換為一個以電池驅動的馬達和一個燃料電池?並且比較每一種配置在車輛層級的性能表現產生的效應(圖1)。

| 圖1 : Simulink虛擬車輛模型的動力系統配置選項。 |
|
以不同的駕駛循環和駕駛風格進行測試可以在此自動地執行,範圍和電池最高溫度等特性也可以被計算與比較。這樣的系統層級分析可以幫助在設計流程的早期作出重要的決策,包含馬達與電池要採用什麼樣的尺寸。
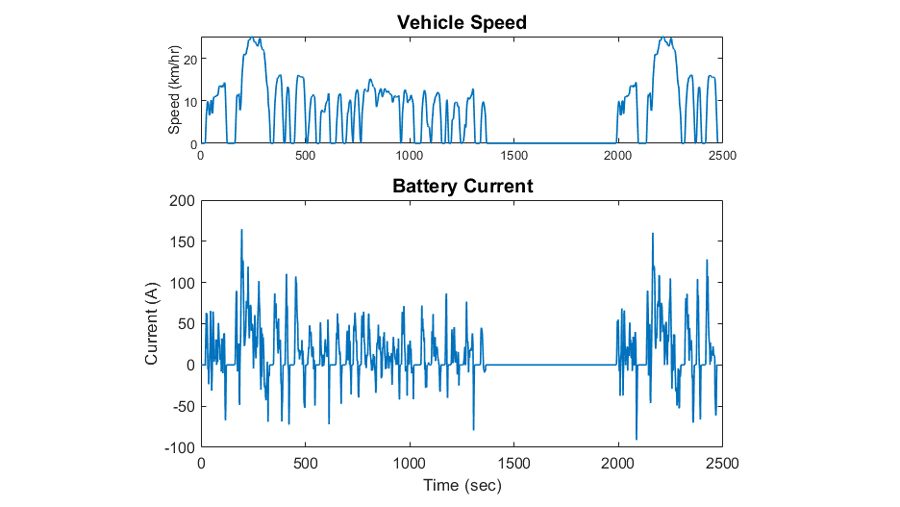
這個帶三組馬達的動力系統模擬結果呈現了電池在加速時需要的電流,以及在再生制動時電池充電所需的電流(圖2)。
調整再生式制動演算法
重複擷取動能(kinetic energy)並儲存在電池的能力是電動車的一大優勢。為了使這項過程的效率最大化,動力傳動系統(driveline)、功率轉換器、與電池的設計必須與電池管理演算法協同合作。在一連串的再生式制動下,再生制動器與傳統制動器得在同一時間啟動,並且需要由控制演算法來確保平穩的減速。
控制演算法的Simulink模型可以連接到線控制動系統(brake-by-wire systems)的Simscape模型,其中包含了負責在制動(煞車)時產生扭力的液壓系統與電動馬達。透過調整這兩種系統,可以取得乘客安全和舒適的需求以及最大化車輛範圍需求兩者之間的平衡。
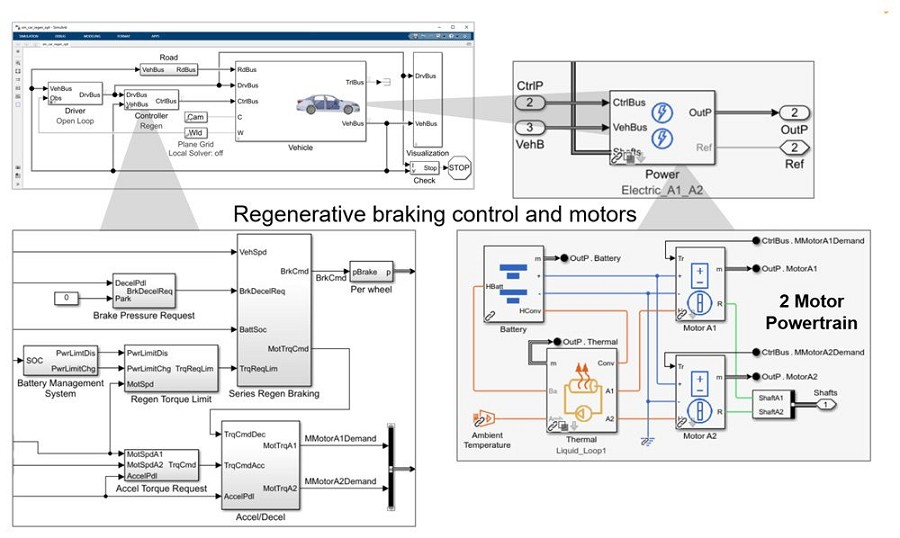
圖3為配置再生式制動的車輛模型。執行在Simulink的演算法,決定電動馬達可提供多大的制動扭力,並且命令傳統的制動器提供所剩的必要制動扭力。
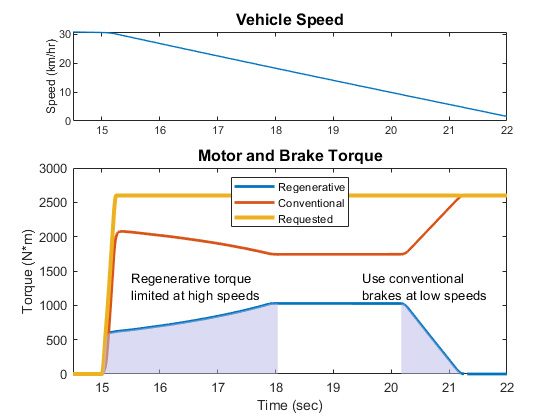
模擬的結果顯示演算法需要混合由各系統提所供的扭力,讓車輛平穩地停止(圖4)。
變更懸吊設計
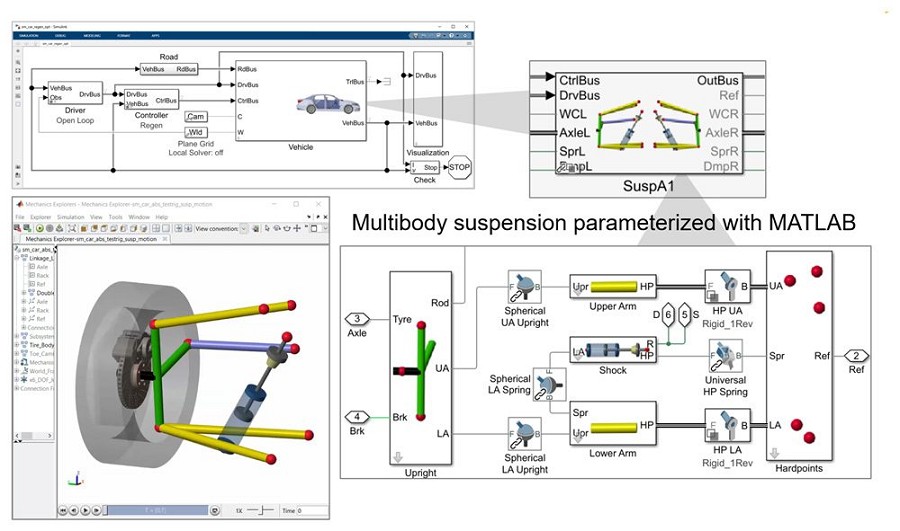
懸吊設計牽涉到乘客舒適度與車輛操縱之間的取捨。懸吊的行為仰賴為數眾多的參數,包含硬點位置(hardpoint locations)、襯套(bushing)的剛性(stiffness)、彈簧應變率(spring rates)等,模擬可以幫助進行新設計的調整,並且測試與現有懸吊的元件整合。
在Simscape模型,可以MATLAB變數來定義這所有的參數,並且使用MATLAB計算性能表現的度量,如輪胎的前束角和車輛的滾動中心。這些參數可以自動地被調整,直到設計符合要求。
圖5為帶有一個多體懸吊的車輛的Simscape模型。紅色球體代表硬點。這通常是由機械設計師透過CAD組合取得,但這也可以從真實車輛量測而來。
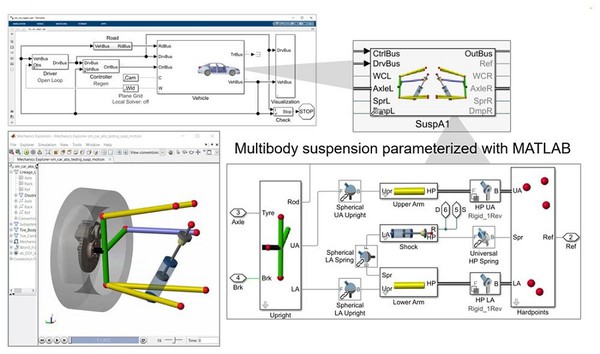
| 圖5 : 帶有從CAD系統取得的硬點的懸吊的多體模型。 |
|
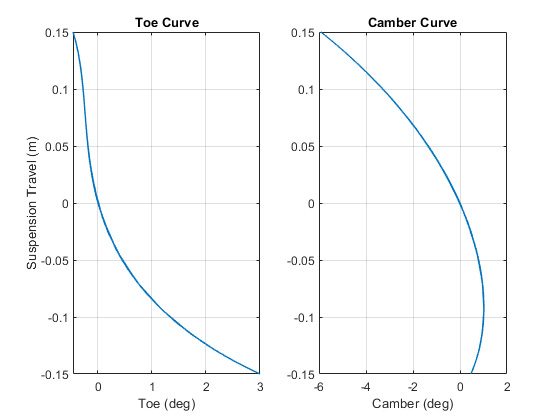
調整那些硬點的位置會影響到如圖6所示的前束角(toe)和外傾角(camber)曲線,而這些曲線會影響車輛的操控。
優化車輛層級的性能
電動車系統通常是由好幾個不同的團隊共同開發。舉例來說,機械傳動和電動馬達會由各自團隊的工程師來選擇,並且由不同的製造商進行生產。制動系統演算法由控制工程師開發,而主缸(master cylinder)、閥門(valves)、泵浦(pumps)則由液壓工程師來選擇。若要讓車輛性能達到最適化,必須要在這些獨立開發的系統之間保有一致性。
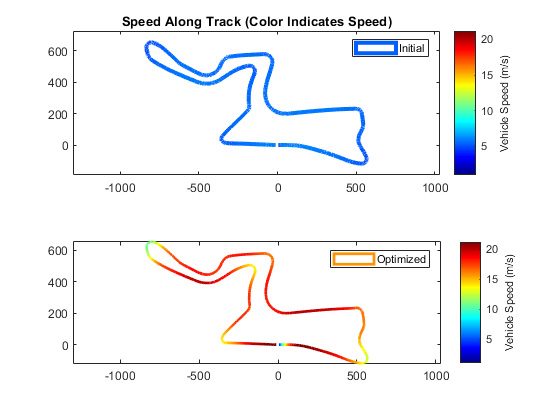
模擬可讓驗證煞車鉗(brake caliper)壓力、電池容量、以及馬達功率的需求,在足以允許平穩加速和減速的範圍之內。舉例來說,可以使用MATLAB的最佳化演算法來調整這些元件的數值,並且在圈速(lap time)與車輛範圍之間取得平衡。
圖7呈現了圈速最佳化的結果。環繞跑道路徑的顏色顯示車輛在直線路段行駛速度較快,在彎道路段的速度較慢時,可以降低行駛一圈需要的時間。
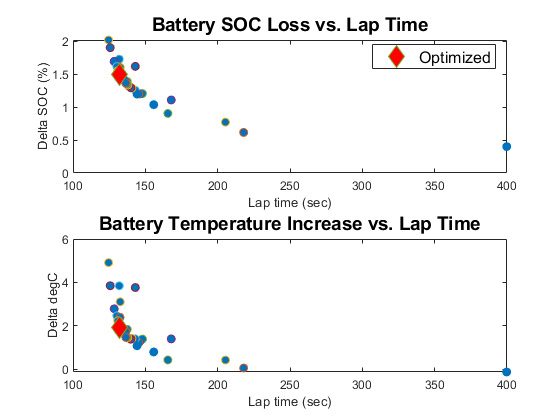
圖8呈現了將電池充電狀態和溫度做為成本函數一部分的最佳化。
開發主動式底盤控制
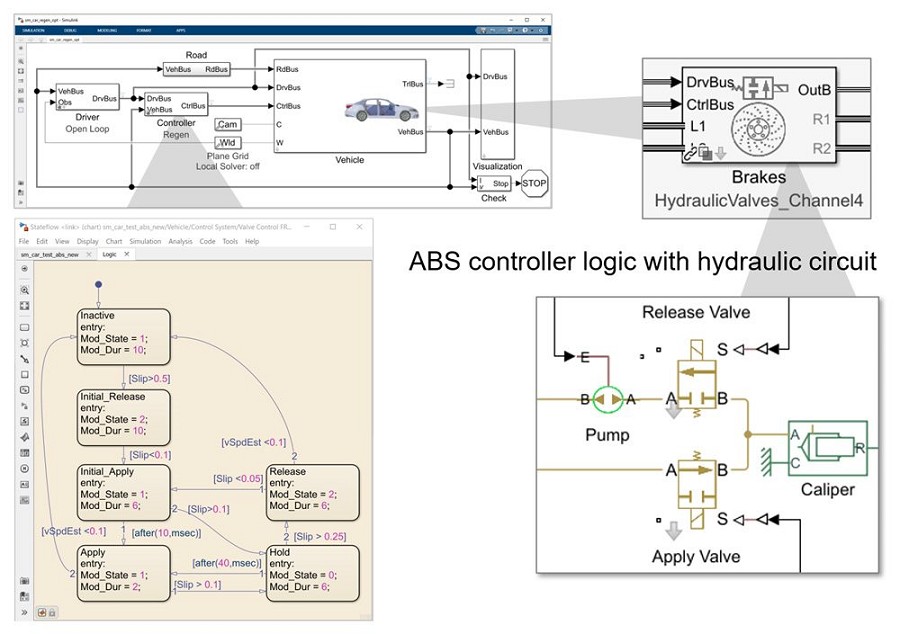
如防鎖死煞車、扭力向量控制和電動穩定控制等底盤控制演算法都是關鍵的安全功能。這些演算法要在行駛於結冰路面或拖車裝載不佳等最具挑戰性的物理條件下運作,也最難以進行測試。
模擬則可以在不造成對人或設備的風險的前提下,來測試這些極端的案例,也可以將有缺陷的元件納入模型,確保採用的演算法具備錯誤的容忍度。
圖9展示的機器狀態包含了一個防鎖死煞車控制系統的邏輯模型,這個邏輯控制了液壓圖表中閥門的啟用與解除。
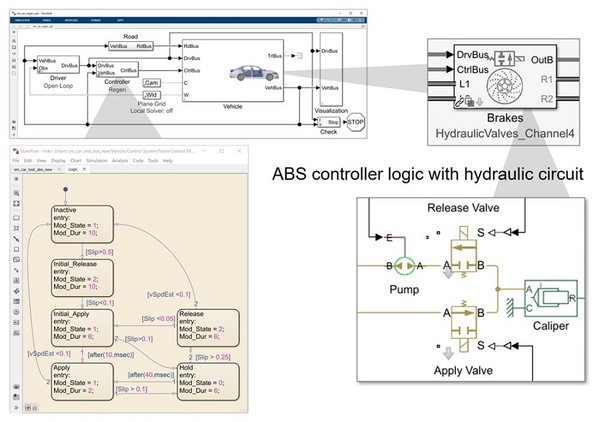
| 圖9 : 帶有防鎖死煞車演算法和液壓致動的車輛模型。 |
|
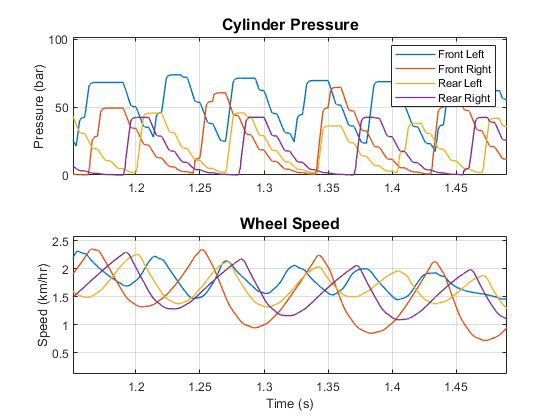
圖10展示了壓力如何隨著系統啟動煞車和維持車輪轉動的各個階段而增加與減低。
檢驗ADAS演算法
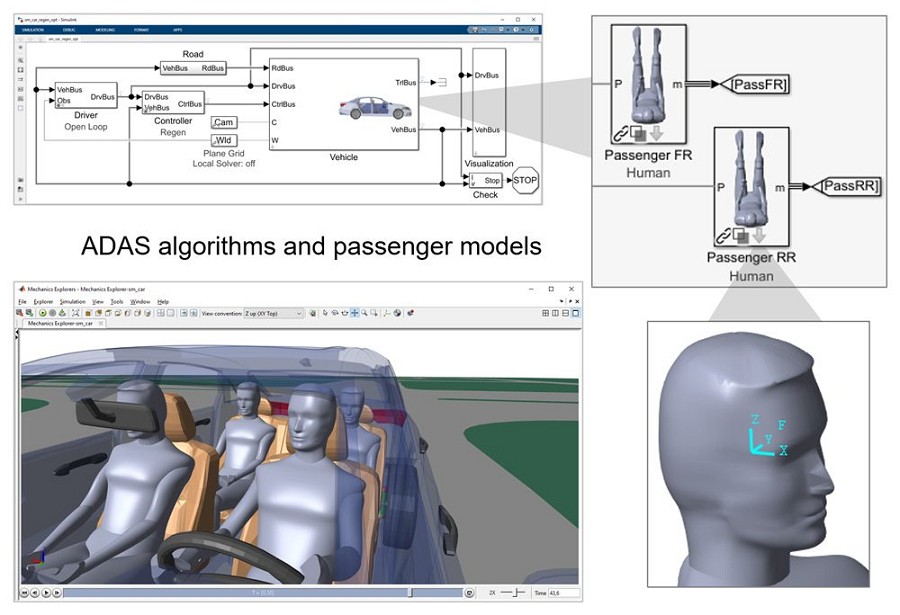
ADAS演算法必須隨時符合安全性要求,但是從市場的角度來看,形成差異的要素卻可能是乘客體驗的品質。舉例來說,當車輛在超車的時候,演算法可能會採取粗糙的方向盤和煞車操控,而可能導致乘客失去平衡。乘客舒適度等主觀的品質難以被衡量,而模擬模型可以產生量測值,幫助你評斷乘客不舒適的程度。
因此,可以將乘客設置為帶有關節的擬人3D機械模型,並且裝上加速器來捕捉乘客隨著由ADAS演算法操縱的車輛移動而感受到的加速與顛簸。接下來,可以在MATLAB進行加速器資料的後處理來推導出不舒適的指標。
圖11描繪一個包含乘客3D機械模型的車輛模型。在這個模擬之中,我們跟隨一條通過測試場所的路徑,藉此測試一組ADAS演算法。
圖12為模擬的結果。我們可以看到,有其中一段操縱過程,由於演算法決定採取煞車造成車輛急遽向前傾斜。
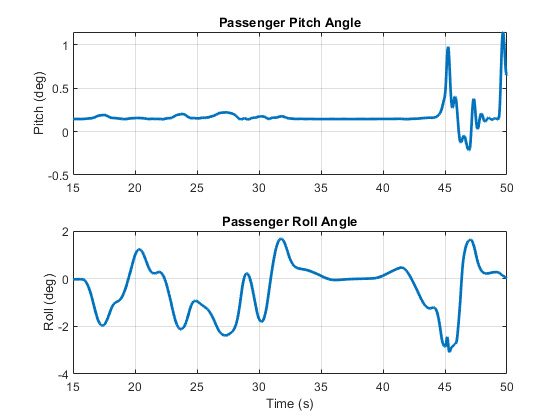
| 圖12 : ADAS演算法測試過程中的乘客動作圖。 |
|
進行硬體迴圈測試
嵌入式控制軟體無論是在遇到經驗豐富或新手駕駛、結冰街道、或者新車或舊車的意外操縱策略,都必須採取適當的反應。使用真實的車輛來測試每一種要素的組合非常不切實際。透過模擬,則可以在虛擬車輛測試嵌入式控制軟體。
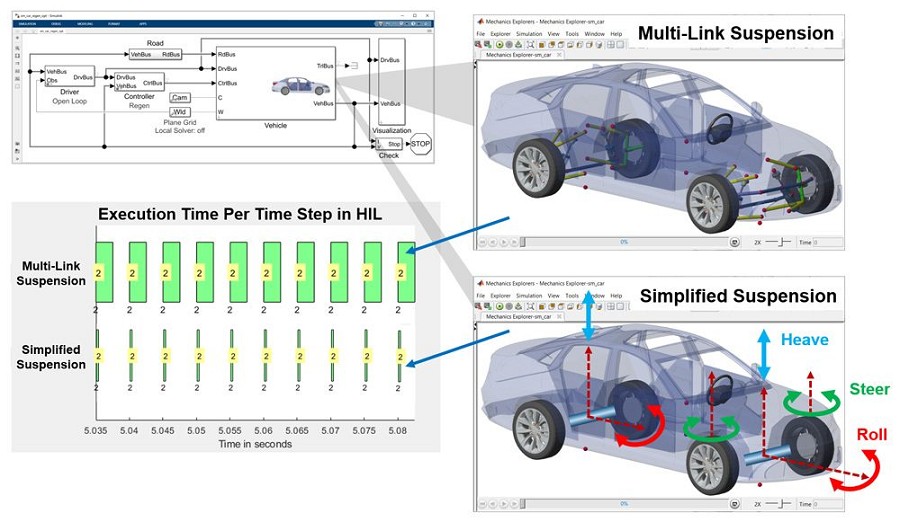
你可以將Simscape模型轉換為C程式碼,並且在硬體迴圈(hardware-in-the-loop;HIL)測試使用這些模型。HIL可以透過即時模擬,協助以各種車輛的類型或條件來測試嵌入式控制單元的軟體和硬體,包含電池過熱和電力網路短路等最糟的情境。
圖13展示了HIL測試當中每個時間步長(time step)的執行時間。這個模型透過Simulink Real-Time在Speedgoat硬體上執行,但也可以執行在其他的即時模擬硬體上。
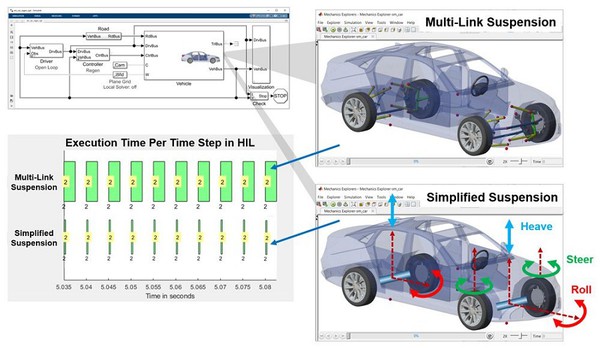
| 圖13 : 車輛模型的兩種配置在HIL測試的執行時間。 |
|
懸吊模型的精確程度可以被調整,給予每個時間步長更多的執行時間進行其他計算任務。
總結
隨著電動車使用技術的飛速進展,評估在設計中加入這些新技術所帶來的影響變得更為重要。具備彈性、可配置的模擬模型,能夠幫助在開發流程的每一個階段快速、無風險地探索這些技術和各種條件權衡。
(本文由鈦思科技提供;作者Steve Miller任職於MathWorks公司)
■本文內容使用的範例模型可以從下列網址下載資訊:
https://www.mathworks.com/matlabcentral/fileexchange/79484-simscape-vehicle-templates