本文敘述以模型為基礎的設計來進行無人自主停車技術開發,以聯結車為例說明,如何採用開發有效率的路徑規劃與控制演算法,並且在真正的卡車上進行驗證,而達成所設定的目標與主要的性能指標。
即使是身經百戰的駕駛,要停好一輛由卡車和拖車組合而成的聯結車,仍然是一件非常具有挑戰性的任務。引導拖車到達一個裝卸碼頭通常需要幾次的操控,而行駛在擠滿行人的狹窄城市的街道,駕駛面對的挑戰更是艱鉅(圖1)。

| 圖1 : 行駛在一個代表著裝卸碼頭情境的測試軌道上的卡車-拖車聯結車(上),以及城市環境(下)。 |
|
為了協助駕駛進行卡車-拖車聯結車的停車,Ford Otosan的團隊開發了一個無人自主停車系統的概念驗證原型。
此原型使用兩個路徑(trajectory)規劃演算法:
一、人工勢場(artificial potential field)演算法:這是與薩里大學(University of Surrey)進行EU TrustVehicle專案合作時的一部份開發項目。
二、RRT*演算法(此為快速搜索隨機樹,rapidly exploring random tree或RRT的變種):此由Ford Otosan內部的團隊開發。利用Simulink來完成演算法的建模和模擬,隨後透過Simulink的產品家族產品進行硬體迴圈(hardware-in-the-loop)測試來進行驗證。接著,藉由在真正的卡車上進行測試,發現這個系統原型只需更少的操控就可以把車停好,而且只需花費資深駕駛者的一半時間。
建立卡車-拖車聯結車模型與路徑演算法
開發團隊已經有開發客車自動駕駛系統和機器人控制系統的經驗,但是從來沒有經手過像是卡車-拖車聯結車這種規模的車輛。除此之外,卡車與拖車是相連的,增加了控制設計的複雜度。
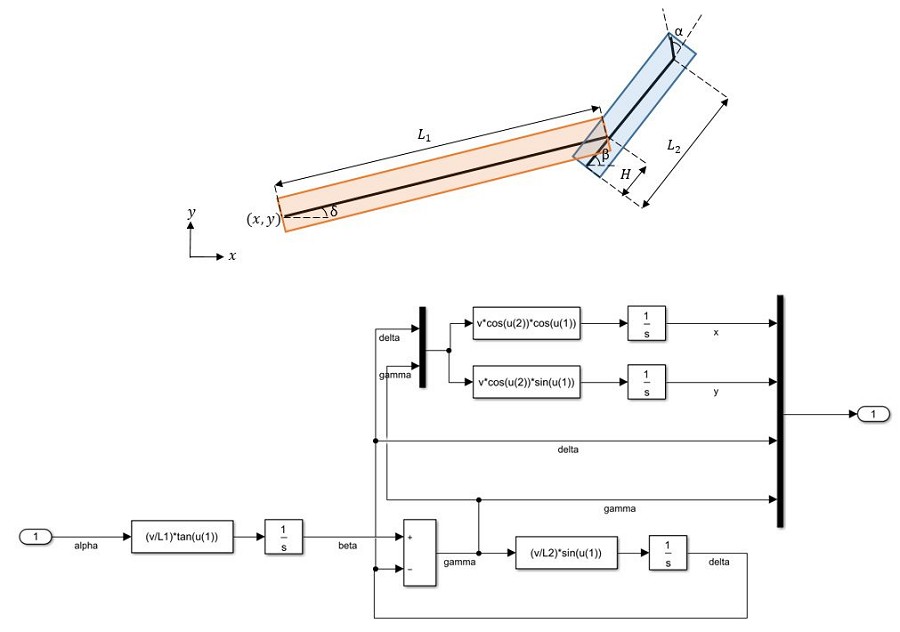
不過,因為使用以模型為基礎的設計(Model-Based Design),可以建立卡車的動態模型、將動態視覺化,並且在開發與調整路徑規劃和控制演算法時,將卡車動態納入考量(圖2)。
以3DOF自行車模型為基礎,建立一個簡單的車輛動態模型,用來表示縱向(longitudinal)、側向(lateral)及偏航(yaw)的運動,並使用實際量測的參數值來建構此模型,比如卡車輪胎的質量。
透過將控制設計切割為幾個單獨的Simulink元件,讓不同的團隊可以獨立作業。舉例來說,一個團隊負責處理路徑規劃元件(實現RTT*或人工勢場演算法)。另一個團隊處理路徑控制元件,他們計算行進的角度、煞車扭矩、產生期望的偏航率所需要的加速扭矩,以及由路徑規劃元件提供的減速和加速;該團隊一開始是將路徑控制元件作為單純的追蹤控制器來實現,不過在之後重新以模型預測控制器實現,以符合更高的速度要求。
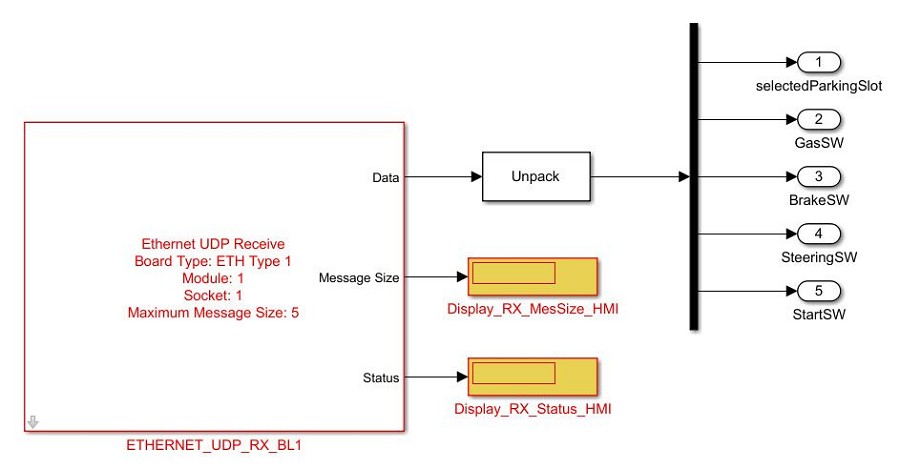
此外,還有一個元件負責實現感知子系統的介面,它使用光達和雷達來定位車輛附近的障礙物和建築物。其他元件則實現了執行在Android?平板電腦上的監控app介面、卡車的CAN匯流排、以及軟體迴圈(software-in-the-loop;SIL)和硬體迴圈(hardware-in-the-loop;HIL)測試環境(圖3)。
| 圖3 : HMI應用之UDP介面的Simulink模型。 |
|
SIL、HIL及實車測試
在Simulink執行初步的驗證模擬之後,在SIL和HIL環境執行更大規模的測試。先使用Simulink Coder(Simulink-C轉碼器)從路徑規劃與路徑控制模型產生程式碼,並且執行包含了模擬的感測器輸入值、一個卡車與拖車動態模型,以及一個環境模型的SIL測試。
在HIL測試,將路徑規劃與控制演算法部署到dSPACE目標硬體上,這些測試能夠在實際於卡車上進行測試之前,先驗證如透過CAN和UDP的即時通訊等設計即時表現。
實車測試是在土耳其埃斯基謝希爾(Eskisehir)的Ford Otosan Inonu測試軌道進行。將執行從Simulink產生程式碼的dSPACE系統安裝在卡車上(圖4)。在最初的幾次測試,可發現卡車的物理模型當中,出現特定參數不正確的數值,包含轉向剛性。
當把這些數值以更加精確的量測值替換,並重新調整控制器,模擬和量測的結果變得非常接近,系統的整體表現帶來極大的改善(圖5)。
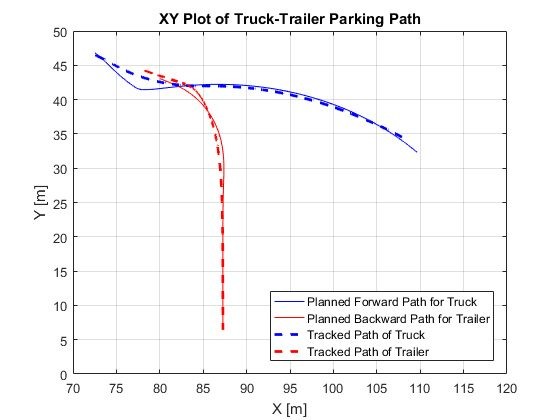
| 圖5 : 定位、偏航率和側向加速的模擬和量測結果比較。 |
|
實際上,在原本猜測需要至少兩到三次操控的情況,卡車僅以單一次的操控就自行停好了;雖然模擬結果顯示這樣的可能性,不過相比於那些具有15到20年經驗的資深駕駛者,演算法能夠更有效率地操控卡車。
整合計畫
透過開發有效率的路徑規劃與控制演算法,並且在真正的卡車上進行驗證,而達成了專案所有的目標與主要的性能指標。現在讓內部的專家將無人自主駕駛模式的聯結車停好。
在Ford Otosan還有其他幾項利用這項停車功能的新計畫正在進行,包含設備管理的專案,以及專攻於卡車遠距控制的項目;未來自主停車系統將整合至這些大型的生產系統。
(本文由鈦思科技提供;作者Eren Aydemir、Ersun Sozen任職於Ford Otosan公司)