使用 MPLAB® X 整合式開發環境(IDE)、免費和開源的Scilab、Xcos 及 X2C 工具簡化您的下一個馬達控制設計,為即時馬達控制應用提供功能齊全的模型設計平臺。X2C 程式碼產生工具支援Microchip的數位訊號控制器(DSC)、微控制器(MCU) 和開發板,以提供完整的硬體和軟體馬達控制解決方案。
主要特點:
● 可在 dsPIC® DSC與 PIC24、PIC32 與 SAM MCU執行
● 與 MPLAB X IDE 和 MPLAB Code Configurator(MCC) 緊密整合
● X2C-Scope 使用八通道虛擬示波器實現即時調試
● 包括許多範例和展示,例如使用dsPICDEMTM MCLV-2和MCHV-3馬達控制開發板的磁場導向控制(FOC)演算法示範
Scilab / Xcos / X2C 目前支援範例如下:
● FOC algorithm with PMSM motor model for dsPIC33EP
● FOC algorithm with PMSM motor model for dsPIC33CK
● FOC dynamometer with PMSM motor model for dsPIC33EP
● FOC algorithm with PMSM motor model for PIC32MK
● FOC algorithm with PMSM motor model for SAM E70
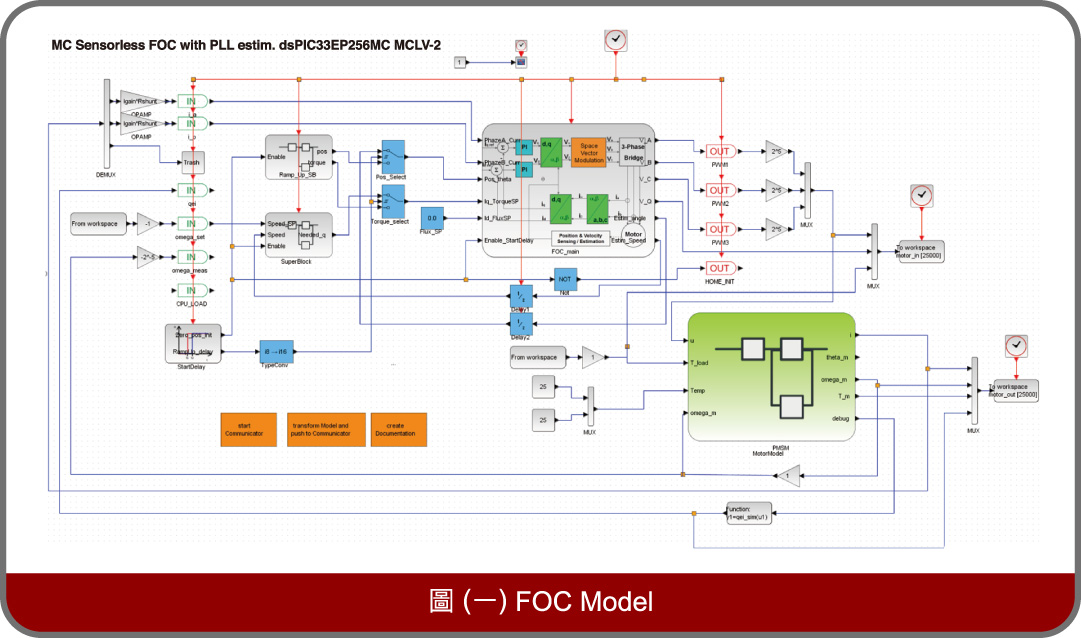
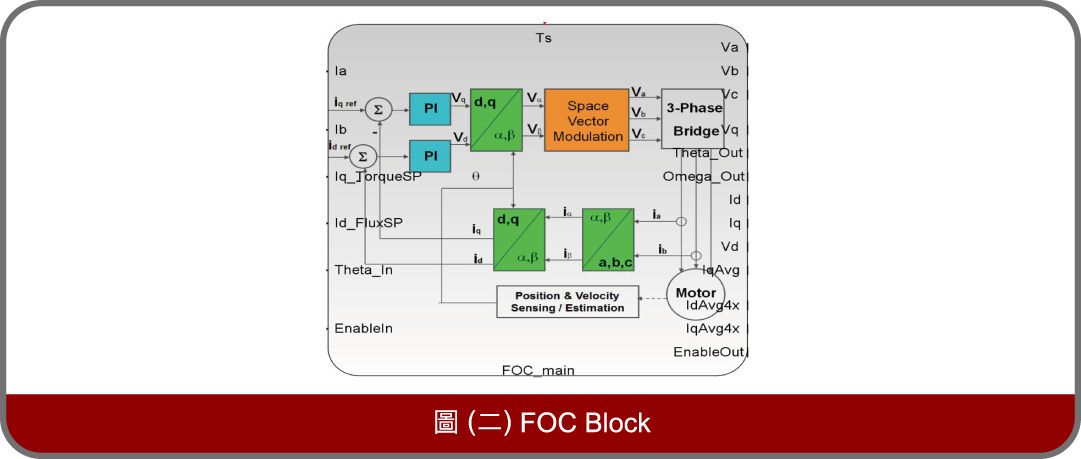
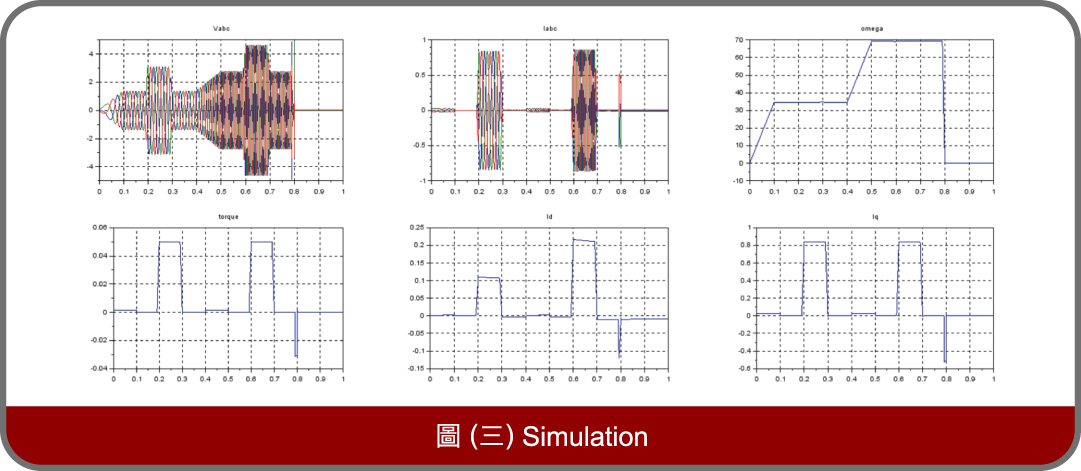
圖(一)是在X2C環境下所建立的永磁馬達(PMSM)磁場導向控制 (FOC)模型。Microchip提供了在此模型中所需的FOC核心,包含座標轉換、PI控制器及SVPWM,如圖(二)所示。最後FOC模型可以在X2C環境下直接產生程式碼並經由MPLAB X IDE燒錄至馬達控制板後執行,也可以只進行模擬,其結果如圖(三)所示。
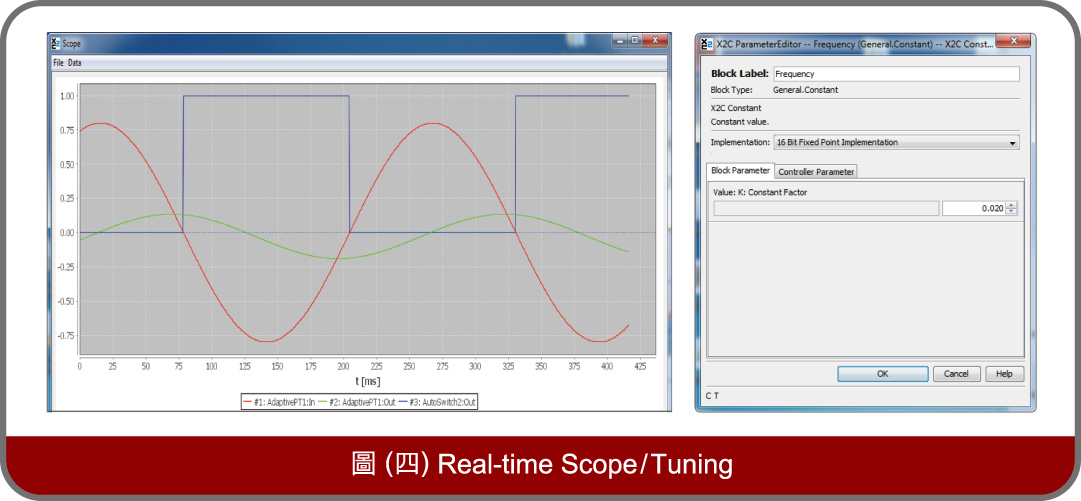
另外X2C也提供了軟體示波器功能,可以經由UART將變數中的資料諸如轉速、位置及命令等從馬達控制板傳至X2C Communicator做即時觀測,也可以及時更改控制參數如PI增益及轉速命令等直接進行調適,省去繁複燒錄的時間。圖(四)為即時觀測控制板中MCU的變數內容以及直接將模型中的變數更改後即時下載至控制板中,使用者可以在Scope視窗中即時看到相對應的改變。
若需進一步了解及下載相關應用範例,請至Microchip官網: https://www.microchip.com/design-centers/motor-control-and-drive/motor-control-simulations/scilab-x2c
本文作者為:Microchip工程師 葛育中