本文介紹基本的以模型為基礎的校準工作流程,以產生採取弱磁策略的永磁同步馬達轉矩控制策略之最適轉矩控制查詢表,以及描述依據弱磁策略的控制查詢表範例。
永磁同步馬達(permanent magnet synchronous motor;PMSM)的校準在設計高效能電動動力驅動控制上是一項不可或缺的步驟。傳統上,校準流程涉及大規模的硬體動力計(dynamometer或dyno)測試和資料處理,其精確程度很仰賴校準工程師的專業度。
而以模型為基礎的校準(Model-based calibration)則可以讓永磁同步馬達的校準流程標準化、降低不必要的測試,並且產生前後一致的結果。這種校準方式是一種經過產業界認證的自動化工作流程,因它使用了統計模型和數值最佳化的方法,讓複雜的非線性系統被調整至最適狀態。
此校準方式也已被廣泛運用各種應用,而以被採納進行內燃機(internal combustion engine)的控制校準而著名。當被應用在電動馬達控制的校準時,以模型為基礎的校準工作流程,可以幫助馬達控制工程師達成永磁同步馬達的最適轉矩及弱磁控制(Field-Weakening)策略。
永磁同步馬達特性與校準:挑戰和需求
永磁同步馬達因為具備了高效率與力矩密度,因而與其他種類的電動馬達相比更為突出,這是因為永久磁鐵裡面的機器不需要外部的刺激就能產生真實的氣隙磁通量,這項獨特的特徵使得永磁同步馬達在非動力式(non-traction)或動力式(traction)馬達驅動應用成為極佳的考慮選項。
大部分的非動力式永磁同步馬達應用只需要機器在定轉矩區域(constant torque region)下操作,其控制架構相對較直接。而動力式永磁同步馬達除了需要快速的動態響應,也需要精確的轉矩輸出以及在較寬的定功率-速度範圍下運作。特別是在電動或混和動力車,為了達到這樣的控制目標,動力式永磁同步馬達必須在弱磁(field-weakening)區域內運作,並在轉矩、轉速和效率之間做出較好的選擇。
有很大一部分的高效能弱磁控制演算法之設計校準,是要依據弱磁控制策略的查詢表格,而在產生表格資料之前,通常需要使用動力計來設定,或者透過ANSYS Maxwell或JSOL JMAG等FEA工具來執行永磁同步馬達的特性測試。
在進行永磁同步馬達特性測試後,便能取得不同電流和轉速操作點下的磁通鏈表和轉矩量測值,這裡我們需要從校準(calibration)把永磁同步馬達的特性(characterization)區分出來。永磁同步馬達特性包含了以一系列在動力計上或者使用FEA工具進行的測試,目標是要擷取出重要的機器資訊,像是磁通鏈和轉矩。永磁同步馬達控制校準涉及了對可產生不同操作點之最大轉矩或最適效率的控制器查詢表進行計算,這樣的控制校準流程通常會發生在永磁同步馬達特性化之後,而這兩項流程都會需要具備高效能的永磁同步馬達控制設計。
以模型為基礎的校準工作流程
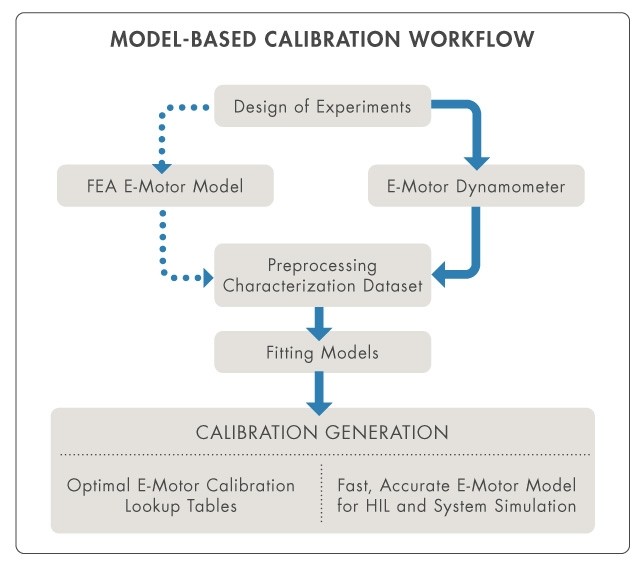
應用於永磁同步馬達的控制校準時,以模型為基礎的校準工作流程通常會包含四大步驟(圖1):
1.實驗設計。
2.永磁同步馬達特性化資料集之預處理。
3.對永磁同步馬達特性化模型進行擬合。
4.優化永磁同步馬達控制器的查詢表資料。
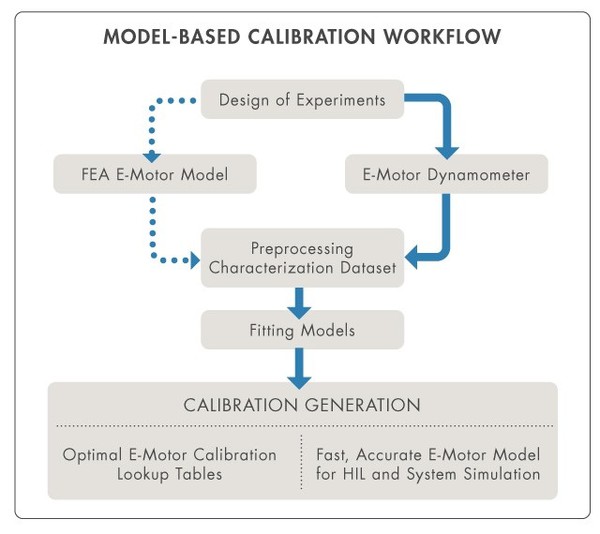
| 圖1 : 以模型為基礎的PMSM控制器校準工作流程 |
|
1.設計特性化之實驗
在實體的動力計上進行全要因特性分析(full factorial characterization)很浪費資源,實驗時間、成本及維護的工作都會因此增加;而以模型為基礎的校準,統計上的空間操作點會預設為測試點,不論實驗是在實體動力計還是在FEA環境下執行,產生的電流id與iq測試點會被作為給定的控制指令,而永磁同步馬達的轉速則由動力計機器控制或者透過FEA工具進行設定。雖然使用虛擬的動力計會需要一個詳細的永磁同步馬達FEA模型,然而模型一旦建立,就可以使用一組非常完整的操作點來進行測試,而不需負擔額外的成本。
2.特性化資料集的前處理
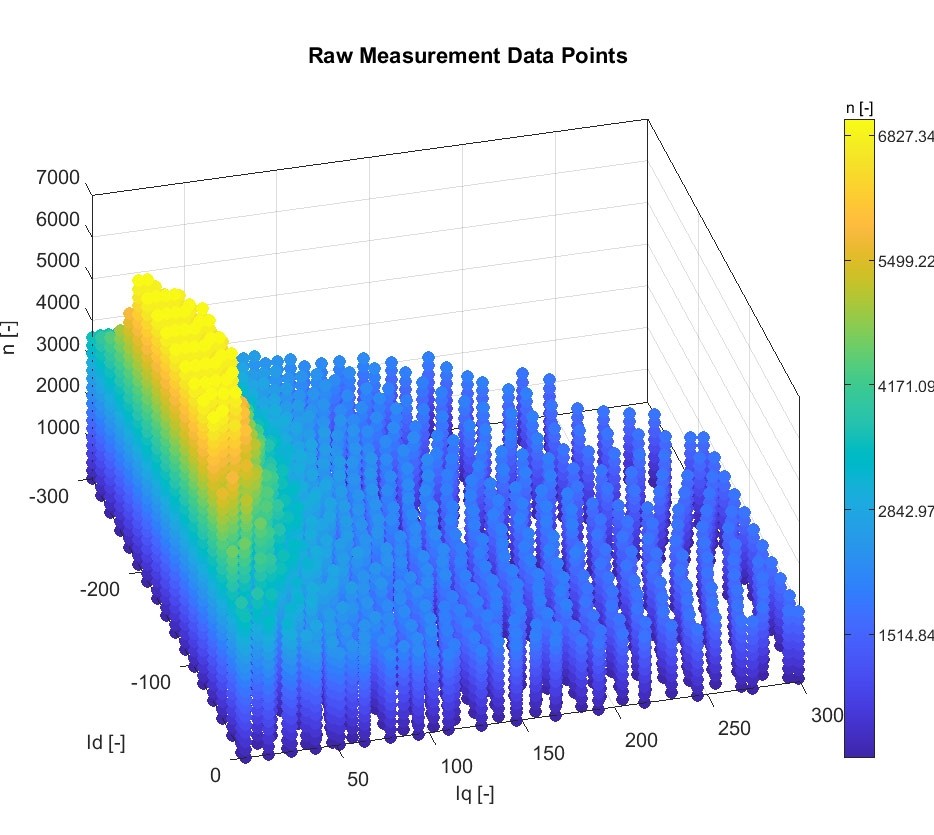
在永磁同步馬達特性化的過程中,轉矩和dq軸的磁通鏈資料可以直接在動力計量測產生,或者由FEA工具依每一個id、iq以及轉速的操作點推導而來。特性化之後,資料集會依轉矩輪廓度和轉速階段重新排序,每一個變量(比如轉矩)會被儲存為一單欄的格式,接著被匯入至Model-based調校工具箱(Model-Based Calibration Toolbox--為Simulink產品家族其中之一的模塊組工具箱)(圖2);有必要的話,可以再執行額外的分析來移除極端值的資料。由於雜訊和量測錯誤的關係,極端值在物理測試上十分常見。
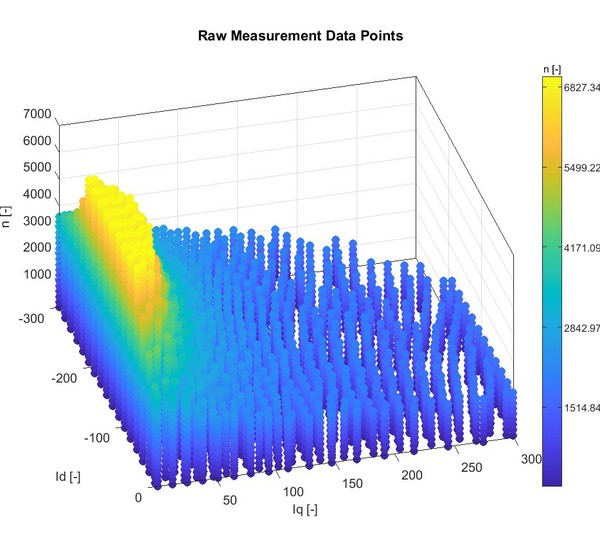
| 圖2 : 匯入到Model-Based調校工具箱的操作點資料集。 |
|
3.擬合PMSM特性化模型
模型擬合(model fitting)在以模型為基礎的校準工作流程中是相當關鍵的一個部分
(請注意本文所提到的模型並非電動馬達或控制器模型,而是統計學模型,如以像是高斯過程迴歸(Gaussian process regression)或者徑向基函數(radial basis function)等函式,表示匯入的資料集中變數之間的關係)。
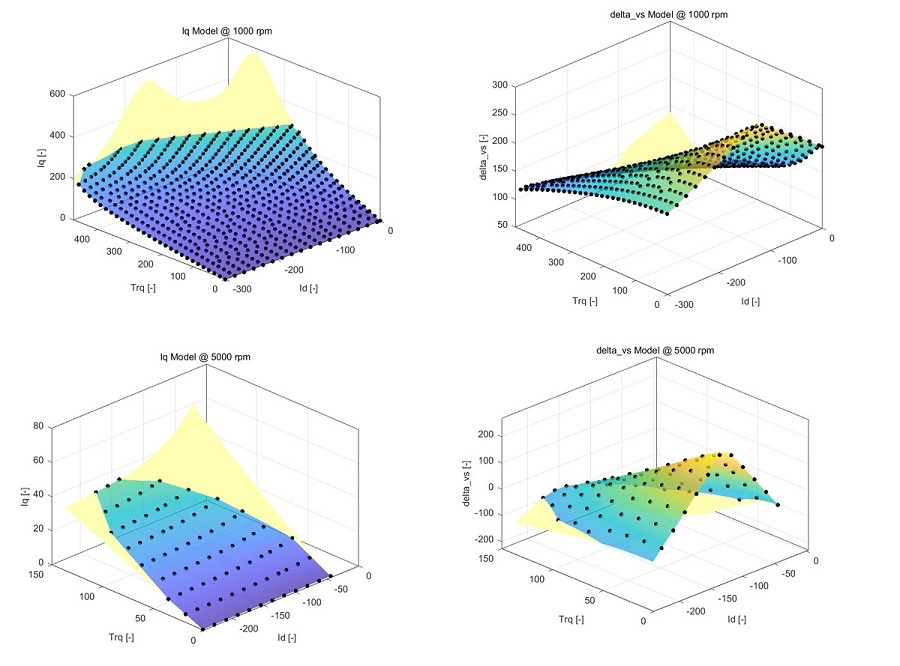
具體的來說,會建立兩組模型:iq為id與轉矩函數,以及電壓裕量(voltage margin)為id和轉矩的函數。每一個模型都是以一組常見的馬達轉速來建模,這些速度被作為最終控制器查詢表的斷點。圖3為以1000 rpm和5000 rpm兩種轉速作為操作點的模型群組。
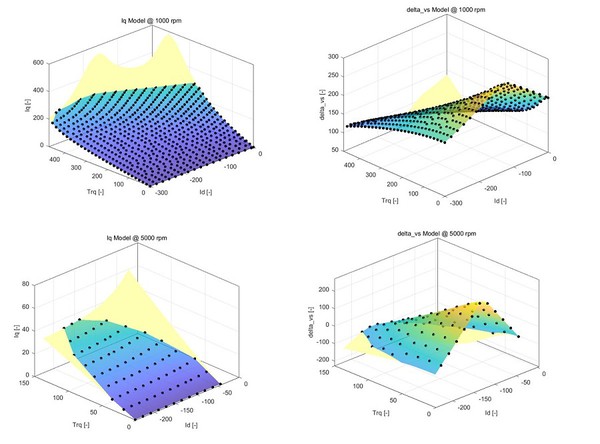
| 圖3 : 不同轉速操作點的iq和電壓裕量(delta_vs)模型範例。 |
|
由於速度可直接影響操作的邊界,iq和電壓裕量模型都會因轉速操作點而變動。要以有限數量的特性化資料點呈現操作邊界是不可能的,因此實際上進行永磁同步馬達校準時,其操作邊界通常以外部的限制係數來施加,例如驅動系統的熱限度及逆變器的DC匯流排電壓等級。
在以模型為基礎的校準當中,擬合模型的操作邊界近似於圍繞資料集的凸包(convex hulls),如同圖3彩色表面的邊緣所示,這些界限對於校準工作流程的第四個步驟相當重要,因為它們會被作為最佳化問題的條件限制來使用。
4.優化永磁同步馬達控制器的查詢表資料
以模型為基礎的校準之中,執行優化的例行工作與產生最終校準查詢表的過程是利用CAGE來執行,它是Model-Based調校工具箱內的校準產生工具。在CAGE裡面,從步驟3建立的模型被使用作為目標函式模型或條件限制。舉例來說,電壓裕量模型被作為不同轉速下的電壓條件限制來使用,以確保總調變電壓不會超過由DC匯流電壓施加的最大值。除了條件限制之外,也可以依據這些擬合模型來設置單一或多項目標。
優化弱磁控制策略的一項常見目標,是在達到所需的轉矩時最大化永磁同步馬達的效率,這可以透過設置每安培轉矩(torque-per-ampere;TPA)作為最大化目標並同步施加電流與電壓限制來達成。這個結果是優化的操作區域,涵蓋了每安培最大轉矩(maximum torque per ampere;MTPA)、每伏特最大轉矩(maximum torque per volt;MPTV)、還有介於之間的操作點。
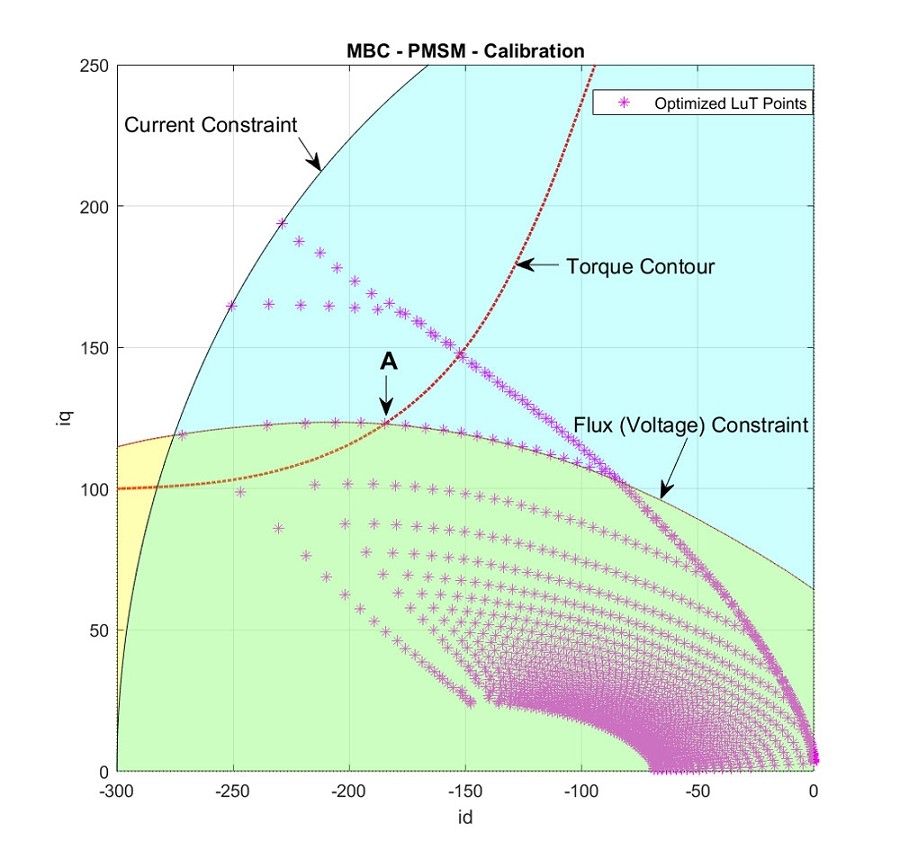
圖4描繪了如何藉由CAGE過程來取得查詢表中經過優化的操作點。淺藍色合黃色陰影區域表示特定轉速操作點下的對應電流和電壓限制,綠色區塊為能夠滿足這兩項條件的可行區域。圖中的轉矩輪廓度表示一個特定的轉矩需求,為了達到最大的永磁同步馬達控制效率,CAGE中的優化器會在可行區域內沿著轉矩輪廓度搜尋,以找出每安培最大轉矩的目標點。因此,在圖4展示的範例,A點會被選為最佳解,圖4其他的最佳化查詢表的點也是以同樣的方式在CAGE裡被計算出來的。
此外,也可以透過平行運算工具箱(Parallel Computing Toolbox),去加速上述的優化例行性工作,藉由平行運算的幫助,在一般四核心電腦上大概可以在10分鐘之內完成整個工作流程。
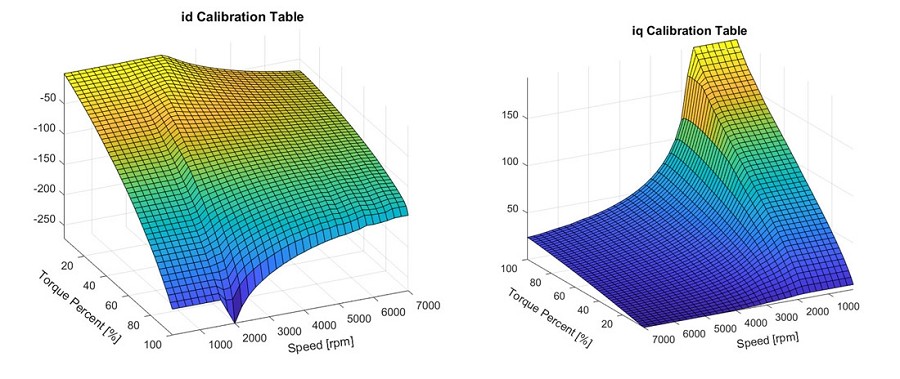
在執行優化例行工作之後,你可以利用像是內插法(interpolation)或裁剪法(clipping)等幾種方式,將最佳的優化結果填入最終校準查詢表。理論上,可以選擇任何轉矩與轉速作為查詢表的斷點,但是最大轉矩的比率是一種常見的力矩斷點選擇,選擇可達到最大轉矩的比率而不是絕對轉矩值,可以確保整個查詢表都已經填入有效的優化結果(圖5)。
工作流程的延伸
本文介紹了基本的以模型為基礎的校準工作流程,以產生採取弱磁策略的永磁同步馬達轉矩控制策略之最適轉矩控制查詢表,文中描述的範例是依據弱磁策略的控制查詢表,其中輸入值包含了轉矩指令、轉速、可能還有DC匯流排電壓。
而對於一個以使用轉矩指令和最大磁通鏈作為查詢表輸入值的演算法而言,工作流程也是相同的,差別只在函式模型有些許差異;除此之外,如果應用需要更精確且精煉過的校準工作,可以考慮在模型擬合和CAGE過程中使用更多的變量,如逆變器壓降、鐵心損耗(core loss)、AC阻抗、以及風阻或摩擦等等。
(本文由鈦思科技提供;作者Dakai Hu任職於MathWorks公司)