本作品使用盛群微控制器HT66F70A做為控制核心,設計出一套自行車專用最佳變速決策系統,內含最佳踩踏點預測系統、電子變速機構及最佳換檔機制。最佳踩踏點預測系統內有扭力感測器,用來得知當下踩踏頻率及扭力狀況。除了透過微控制器晶片收集扭力感測器資料進行自動換檔,並透過指數平滑法分析踩踏頻率以及扭力數據,判斷換檔當下的踩踏狀態是否適合換檔,避免造成空踩導致騎乘者受傷。
電子變速機構可在無須更動配件的情況下連結市售之變速裝置,透過自動換檔演算或手動按下手把上之按鈕控制即可換檔以及顯示當前檔位,再配合最佳換檔機制避開不合理檔位以及達到序列變速,避開大盤及飛輪位置差異過大,減少變速器及鏈條的磨損,最後使用伺服馬達拉動變速線進行換檔。本作品能夠有效的避免使用者在變速上的操作不當,降低在錯誤換檔時會產生的危險。
自行車變速系統提供騎乘者在不同車速下皆有舒適之騎乘環境。完整之外變速系統包含了大齒盤與飛輪、前後變速器、變速撥桿、變速鋼索及鏈條[1]。隨著自行車的發展及技術的提升,自行車的變速檔位越來越豐富,但是騎乘者常常會因為組合太多,導致在執行變速判斷錯誤產生許多問題,例如:沒有熟記齒輪比導致換檔後重踩或空踩、大小齒輪配合不當造成鏈條磨損或者不正確的換檔時機進行換檔導致鏈條落鏈或卡死的情況發生。這些都可能會導致騎乘者容易耗費過多體力,甚至發生危險或是造成身體傷害。
自行車變速器分為電子和機械兩種,大部分自行車多為機械式。目前電子式變速器雖然性能優異換檔速度快且精準,然而單價高且相關零組件都必須同步更動,導致市場普及率不高,僅有高端玩家及競技的市場採用[2]。
由於機械式變速器已具有良好的機械精度,在既有的機構上進行改裝電子化,不僅成本較低也能夠達成一般使用者對於自動化與電子化的需求。使用者只須購買外掛式的電子套件,將變速撥桿移除改為電子按鈕,連結原有變速鋼索即可進行升級,達成自動換檔、快速換檔、最佳換檔時機、最適合齒輪比匹配等功能。相信對於使用者具有很大吸引力。
工作原理
本作品使用盛群微控制器HT66F70A做為系統控制核心,設計出一套可外掛式的自行車最佳變速決策系統,並透過扭力感測器的數據判斷踩踏扭力以及踩踏頻率。當需要換檔時使用伺服馬達控制變速裝置拉動變速線控制自行車原有之變速結構,並配合演算法達到自動換檔、最佳化傳動效率的序列變速、避開不合理的換檔檔位、在踩踏扭力最大時機換檔等多項創新功能,其各項工作原理與演算法則說明如下。
最佳踩踏點預測
自行車動力是經由騎乘者透過腳踩踏踏板而來,而當單腳踩踏自行車時可將其視為五連桿機械結構[3]。當踩踏至踏板不同位置時,所產生的力道也不同。
考量雙腳輪流踩踏的情形在高的位置是最佳變速的踩踏位置,此時扭力為最大值。而當踩踏低的會是扭力最小的時候,此時換檔則發生變速不順的情況,且容易造成踩空危險。因此使用扭力感測器內建的紅外線感測器,感測踩踏位置,並結合扭力感測器,先利用指數平滑法預測並判斷是否位於最佳變速時機,並在感測有無扭力連續發生,若都成立則進行換檔。
最佳換檔機制
排除不合理檔位
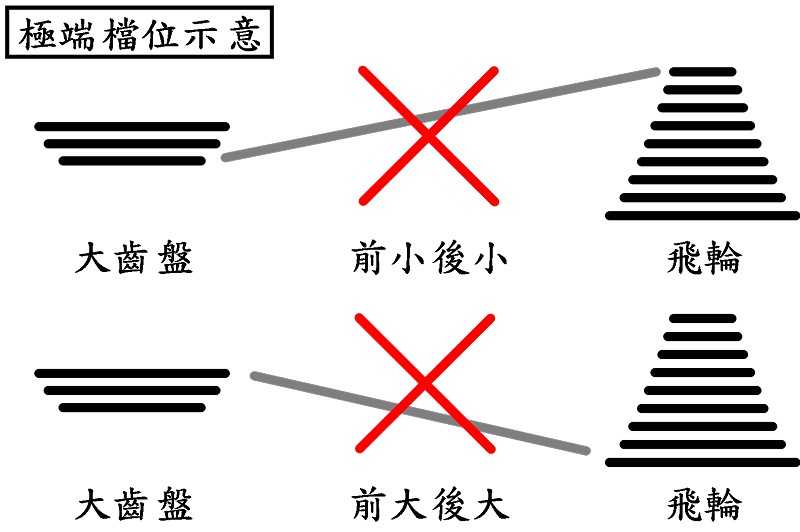
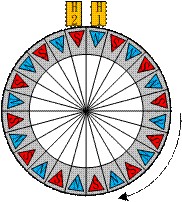
自行車騎乘者可能會因為變換檔位時換到不合理檔位如圖一,造成齒比差距過大導致鏈條承受的壓力過多,導致變速器及鏈條磨損造成損壞。透過此系統排除掉不合理檔位
序列變速
由於機械結構複雜,齒輪比與變速器之間的關係並非線性,使用者常常變速時換至不正確的檔位容易造成空踩或是阻力忽然增加。如表一所示,當變速器為前2檔,後2檔(齒輪比為1.07:1),下一個檔位卻是前3檔後5檔,使用者不須熟背齒輪比,僅需使用按鈕裝置即可達到線性變速。
表一:變速器檔位與齒輪比關係
|
?
|
後1
|
後2
|
後3
|
後4
|
後5
|
後6
|
後7
|
|
前1
|
1.29
|
1.47
|
1.69
|
1.91
|
2.20
|
2.59
|
2.93
|
|
前2
|
0.94
|
1.07
|
1.23
|
1.39
|
1.60
|
1.88
|
2.13
|
|
前3
|
0.65
|
0.73
|
0.85
|
0.96
|
1.10
|
1.29
|
1.47
|
指數平滑法
本系統將扭力數值使用指數平滑法做演算,而指數平滑法是布朗(Robert G. Brown)所提出[3],布朗(Robert G..Brown)認為時間序列的態勢具有穩定性或規則性,所以時間序列可被合理地順勢推延;他認為最近的過去態勢,在某種程度上會持續到最近的未來,所以將較大的權數放在最近的資料。
一次指數平滑公式:
St=ayt+(1-a)St-1
二次指數平滑公式:
St(2)=aSt(1)+(1-a)St-1(2)
其中St
為時間t的平滑值,
Yt
為時間t的實際值,St-1
為時間t-1的平滑值,a為平滑常數,其取值範圍為[0,1],僅需要兩個數值,
即Yt和St-1
,
再加上平滑常數a,使指數滑動平均具逐期遞推性質。平滑常數a越接近於0,遠期實際值對本期平滑值影響程度的下降越緩慢。
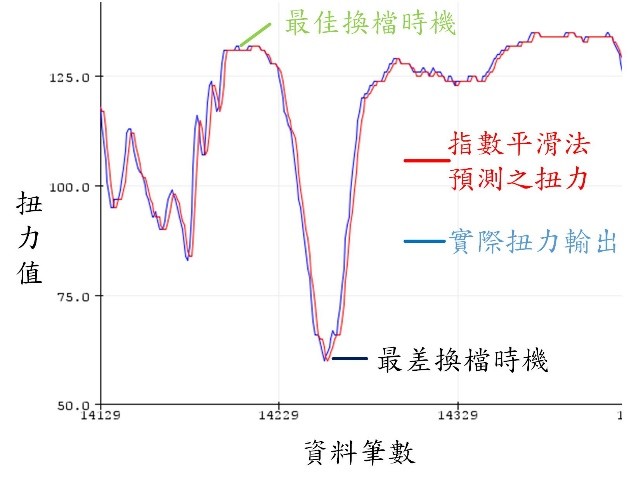
利用此演算法特性台預測扭力未來值。圖二為本作品實際量測一次踩踏扭力變化的情形,可以發現紅色使用指數平滑法預測之扭力有非常高的正確性。因此利用此方法預測最高扭力輸出位置作為換檔時機,將有助於鏈條有效咬合,增加傳動效率避免空踩落鏈。
作品結構
系統架構圖
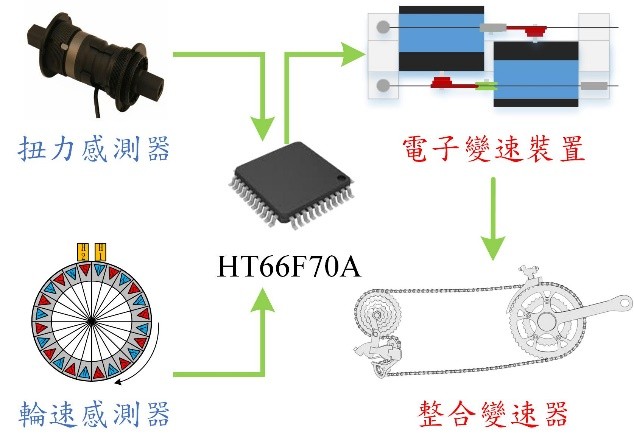
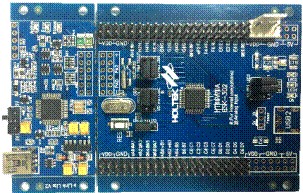
本作品以盛群HT66F70A晶片為主控制晶片,配合中軸扭力感測器、輪速感測器、伺服馬達、按鈕裝置與拉線式變速機構,本裝置系統架構圖如圖三所示。
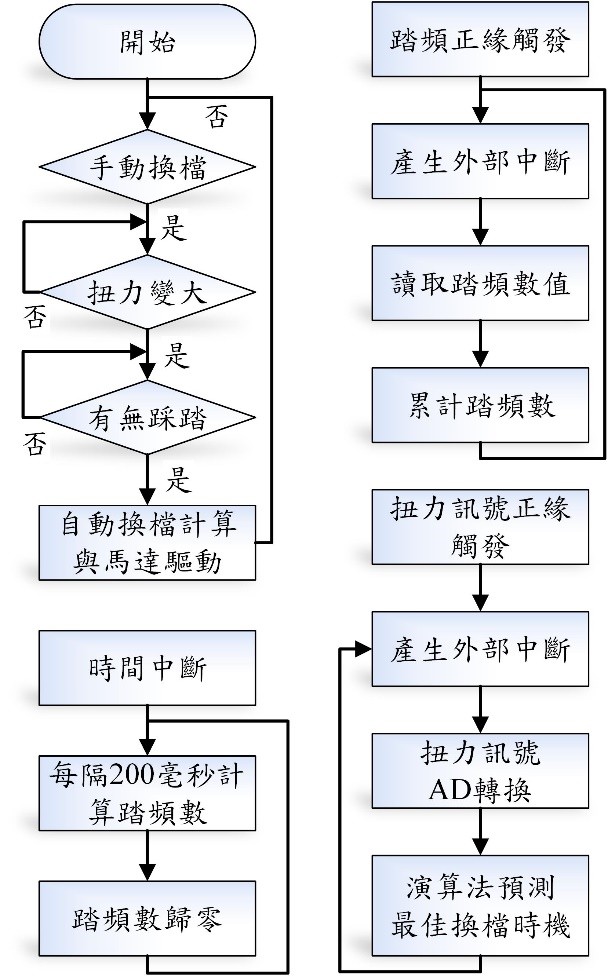
系統流程圖
圖四為本作品系統流程圖,當使用者進行換檔動作時,微控制器讀取扭力感測器得知目前扭力及踩踏頻率,並且套入指數平滑法進行預測,若預測結果適合換檔,則系統輸出PWM脈波訊號至伺服馬達拉動變速線進行換檔。
微控制器HT66F70A
盛群晶片HT66F70A:將量測到的扭力感測器數據經由A/D轉換後,判別是否有無踩踏,在經由收集輪速感測器的數據,判別是否在於最佳踩踏點位置,再以脈波調變輸出控制啟動伺服馬達拉動變速線至合理檔位。
扭力感測器
電阻式扭力感測器架設於自行車踏板中軸中,並提供雙曲柄(兩腳踩的力道)感測功能,當踩踏扭力越大所量測到的電壓會越高。將此訊號以微控制器之類比數位轉換器得知數據。
輪速感測器
輪速感測器架設於自行車踏板中軸中,內置滾動軸承感測踏板位置,依照轉動情形輸出5V級的準正弦波電壓(10脈波/圈)。此訊號的頻率,即每秒鐘產生的脈衝個數,反映了踏板踩踏的快慢,通過脈衝的頻率即可得知踩踏速度。
伺服馬達
本作品將伺服馬達用於拉伸變速器的大盤及後飛輪鏈條位置,以調整變速器段位。Futaba S9177SV/HPS-700為標準數位高扭力的兩組伺服馬達,當接上7.4V電源時,最高可耐重41 公斤與74公斤,速度為0.11秒/60°與0.12秒/60°,符合本作品控制變速器需要的力量與速度。
自行車變速器
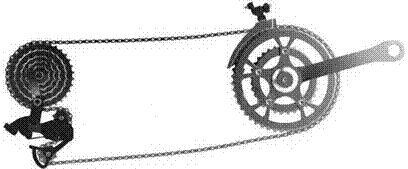
使用市面上目前主流的自行車外變速器,完整的外變速系統包含了大齒盤及飛輪、前後變速器、變速撥桿、變速鋼索及鏈條。利用此變速器類型,將鋼索導引至伺服馬達上的擺臂圓盤,已達到自動控制變速器的功能。
電子變速機構
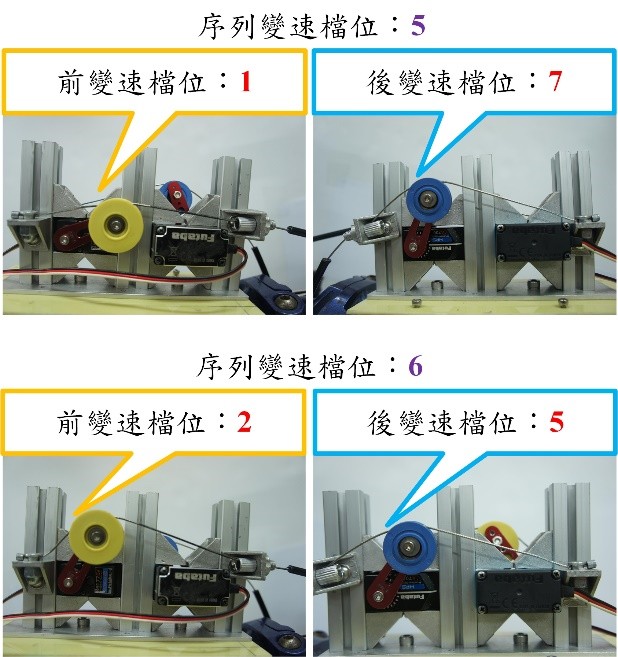
將前後變速鋼索拉至本電子變速機構並透過微控制器輸出脈波訊號給伺服馬達以調整擺臂的角度不同,改變變速線鬆緊度,以調整前後變速器關係及檔位,如圖十為當騎乘者從序列變速中的第五檔升檔時,伺服馬達因改變擺臂的角度,而變換至序列變速中的第六檔。
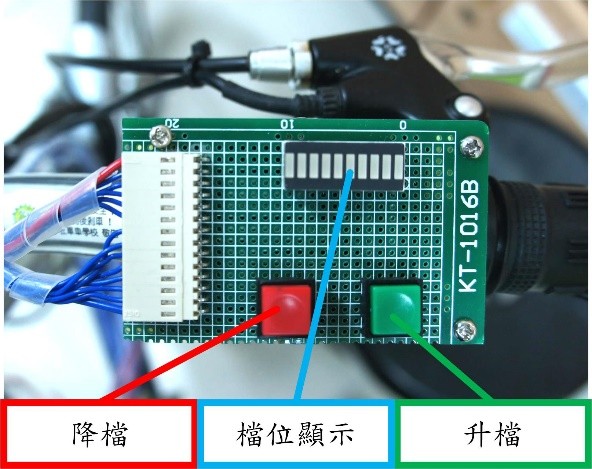
手動變速按鈕
當騎乘者更變至使用手動變速模式時,使用者可以按下安裝於手把之升檔按鈕或降檔按鈕以切換檔位,如圖十一,同時換檔也對照序列變速如表2變換檔位。
測試方法
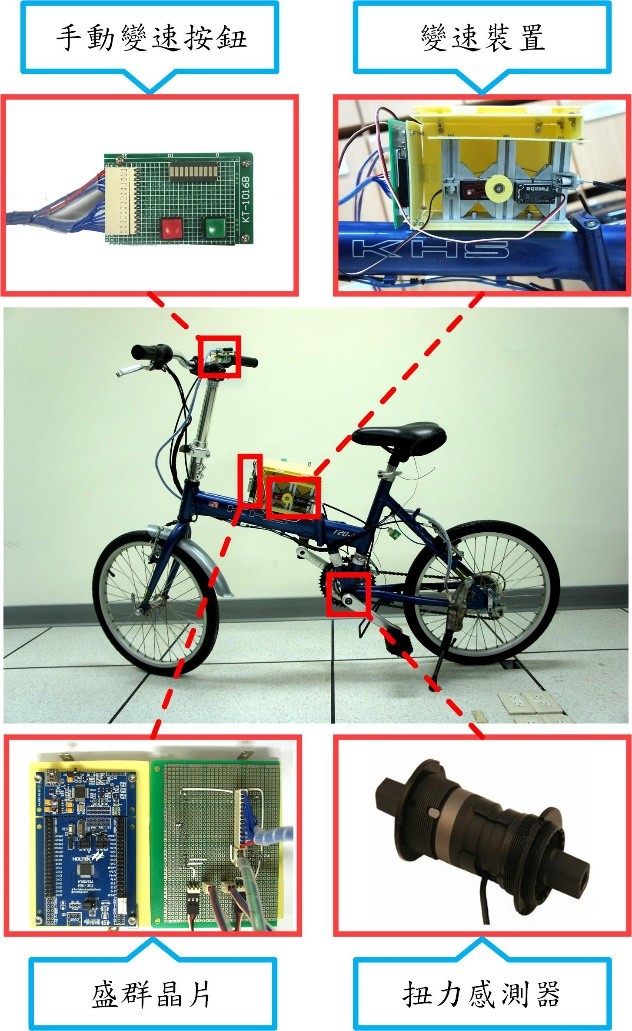
硬體系統安裝
本作品將盛群微控制器HT66F70A安裝於車身,龍頭上裝有按鈕裝置,車架上設置了電子變速機構,扭力感測器架設在大齒盤中,如圖十二為本作品的硬體位置圖。
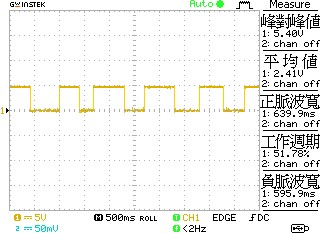
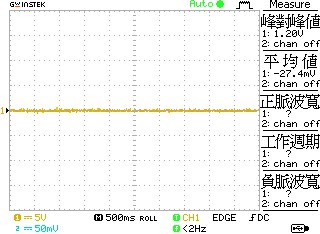
紅外線感測踩踏頻率
裝設於自行車曲柄軸內的輪速感測器,當曲柄軸旋轉一圈時,紅外線感測器會收到十個脈波訊號如圖十三,無轉動時則如圖十四。
序列變速測試
當騎乘者為使用自動變速時,會將騎乘者的踩踏扭力對照該檔位的平均扭力值,一旦超過該檔位的平均值時,會自動將電子變速裝置調整至適合當下騎乘的檔位,當切換檔位時微控制器會控制伺服馬達,使用PWM脈波寬度調變檔位,並參考表一整理出循序切換檔位如表二。當系統從序列變速中的一檔切換至序列變速中的二檔,則參考表二前變速器維持不變,後變速器則切換至4檔,如此一來則可以讓初學的騎乘者省去很多不便,並且可以非常簡單輕鬆的騎乘如圖十五。
表二:序列變速列表
|
序列變速
|
前輪檔位
|
後輪檔位
|
齒輪比
|
|
1
|
3
|
3
|
0.85
|
|
2
|
3
|
4
|
0.96
|
|
3
|
3
|
5
|
1.1
|
|
4
|
3
|
6
|
1.29
|
|
5
|
3
|
7
|
1.47
|
|
6
|
2
|
5
|
1.6
|
|
7
|
1
|
3
|
1.69
|
|
8
|
2
|
6
|
1.88
|
|
9
|
1
|
4
|
1.91
|
|
10
|
1
|
5
|
2.2
|
自行車專用最佳變速決策系統測試
本實驗在完成各項單元測試後,進行軟硬體整合,並請同學測試,經測試調整各項參數後,完成本套系統,以圖十六為該同學於起步後一秒進行升檔動作,經過演算法演算後,成功切換檔位。
(本文作者陳智勇1、許嘉洲2、劉羽哲3、楊聖達4、蔡明智5為樹德科技大學電腦與通訊系1教授、2-5學生)
參考文件
[1] Lin T. Y., “A Research in the Tests on Bicycle Derailleur Systems,” Ph.D. Dissertation, National Chiao Tung University, Taiwan, 1998.
[2] SHIMANO, 電子變速系統套件Di2, DIGITAL INTEGRATED INTELLIGENCE https://bike.
shimano.com/zh-TW/technologies/component
/details/di2.html
[3] M. L. Hull and M. Jorge, “A Method for Biomechanical Analysis of Bicycle Pedalling”, Journal of Biomechanics, Vol. 18, No. 9, pp.631-644, 1985.
[4] Brown, Robert G. . Exponential Smoothing for Predicting Demand. Cambridge, Massachusetts: Arthur D. Little Inc. p. 15, 1956.