「觸覺傳遞輔助聽覺」:現今視障者白手杖的改良多半採用語音的方式告知使用者,在語音傳遞上有著諸多不便,為此我們改用觸覺將訊息傳遞給使用者,當加上超音波感測器之白手杖偵測障礙物的同時 便會傳遞訊號給手環,手環再藉由滾動的方式告知使用者。
創作動機
現今的導盲手杖都以語音溝通為主,但若在人多嘈雜的公共場所便難以發揮效用,一方面是周遭雜音會干擾接收器,另一方面是視障者可能不想發出聲響影響其他行人;為此我們設計出穿戴式體感手環取代語音,以觸覺來告知使用者是否遭遇障礙物。
設計概念
導盲杖
以大多視障者使用的「白手杖」做為基底改良,加上兩個超音波模組來感測前方60 度以及4公尺的障礙物的感測,再透過網路將障礙物的位置傳到手環,此外更加上微電腦設計語音助理功能幫助視障者更了解室外狀況。
智能手環
我們設計的手環和導盲杖,藉由步進馬達的轉動提供視障者回饋;當導盲杖上的超音波感測器感測到有障礙物時手環便會轉動,會根據視障者前方 障礙物的位置及距離以轉速不同之呈現方式反饋給使用者。
工作原理
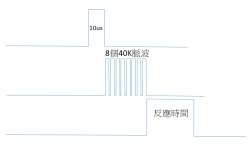
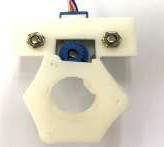
本作品藉由 HT66F2390 開發版輸出 8 個 40kHz脈衝給兩組超音波測距模組 HC-SR04,接收腳位(PA1、PA3)回傳並記錄反應的時間(量測到物體後反射回來後的時間),轉換成真實距離,並藉由這兩組距離值,經由程式邏輯控制步進馬達 28BYJ-48(手環)如圖 1 所示,判斷給使用者行走方向,直 走、向左走還是向右走。
MCU主要核心功能
本作品運用到Holtek MCU的核心功能,HT66F2390 上的處理編程與指令,用作函式以及判斷式處理;並運用計時模組計算超音波回傳腳位時間以及馬達運轉時間;以乘除單元轉換數據,以靈活的輸入輸出腳位控制步進馬達,如圖二所示。
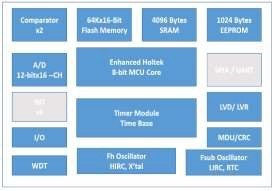
| 圖二 : HT66F2390 核心功能 (藍色為已使用、灰色為未使用) |
|
作品結構
感測端元件架構設計
本作品參考並改良論文[1]的設計,論文[1]所使用的感測元件有紅外線如圖三所示,紅外線主要使用於手環轉動時能精準控制其轉動位置,由於我們考慮視障者攜帶簡便的要素,將其改良為步進馬達取代原本的紅外線與 DC 直流馬達。
MCU和周邊元件相互關係
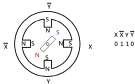
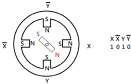
28BYJ-48步進馬達大致上有四個輸入端內部結構是以四個輸入端分別接上線圈以製造磁場。首先,四個輸入電壓藉由線圈產生或改變四個方向的磁場,藉由磁場的改變,以達到控制步進馬達轉子的效果。步進馬達的轉子為永久磁鐵,藉由電磁線圈控制轉子角度,以達到順時針旋轉和逆時針旋轉的效果。若要讓馬達待機,則令輸入全為0,取消環境激磁。若要讓馬達逆時針旋轉,則依序將相對應的,訊號以1001, 0101,0110, 1010 循環輸入,則能讓馬達以 45度, 135度, 225度, 315度的順序旋轉,反之亦然,如圖四~圖七所示。