本作品主要研發一套具有雲端智慧型判斷之水耕蔬菜培養系統,系統傳動機構採摩天輪式將水耕蔬菜接觸營養液,透過溫溼度感測器,監測溫溼度將資訊傳送至雲端記錄分析,驅動水牆與抽風達到培 養箱控溫與濕度。本作品以模糊邏輯控制判斷機制,用 Holtek HT66F70A 作為主要控制核心晶片,系統運作經由溫濕度及 pH 值感測元件,擷取數據至晶片整合感測器訊號,後以 LCM 作為顯示及操作之介面。系統實際整合軟硬體控制介面,形成一套智慧型水耕蔬菜控制系統,測試結果符合預期研發目標。
近年來食安問題越來越受到重視,養生觀 念也被越來越多人提起,若能在自家種植蔬菜,既可以達到安全衛生、又能安心食用,而 蔬菜培養箱恰好能解決此問題,亦能解決土地 空間不足問題,若再加上摩天輪式系統傳動機 構設計,可使其具舒壓及觀賞用途。
傳統控制大都採用 SISO 自動控制模式, 以 MIMO 智慧型較少,為有效遠端智慧判斷,結合雲端數據上傳與下載,既方便又實用。模糊邏輯控制器可以有效整合感測器訊號,進行模糊推論,將培養箱依據規畫之規則庫進行推論,最後再解模糊得到最適控制輸出[1-3]。本 作品乃針對水耕蔬菜實際控制需求,建置出一般家庭可以培養的智慧控制模式,可廣泛應用一般小家庭食用。
工作原理
本作品以食用及觀賞為主要目的,設計一套 水耕蔬菜培養箱;運用摩天輪結構設計做為觀賞用途。水耕蔬菜運用水牆與風扇達到降溫及增濕效果,並搭配LED 光源調整至蔬菜適合的光譜。後將以上數據做模糊邏輯控制至最適條件,並在 LCM 上做顯示,同時上傳雲端進行儲 存。
本作品採用 Holtek HT66F70A 作為主要控制晶片核心,分別控制抽水馬達、馬達、風扇及LED 燈,並接收溫濕度感測器、pH感測器及控制按鈕等作為控制判斷條件,搭配 RA8875 LCM 作為顯示畫面及網路通訊模組上傳至雲端資料庫儲存。
作品結構
本作品智慧型水耕蔬菜培養系統,主要分為五部分,分別為硬體結構設計、控制系統和電 路設計、模糊邏輯控制器設計、程式設計及雲 端控制系統設計。硬體結構以 Inventor 繪圖軟體 繪製完成、控制電路以 Altium Designer 軟體繪 製、程式以 HT-IDE300 程式書寫軟體設計。
硬體結構設計
本作品主要分為兩個區塊,分別為控制電路層及水耕蔬菜培養層如圖 1 所示。控制電路層 以壓克力且密封的方式設計,主要是隔離底部水氣,內部放置 Holtek HT66F70A 控制晶片、 LED 燈板、LCM 顯示控制面板及電源供應器等電控設備;水耕蔬菜培養層如圖 2 所示,結構 主要以鋁擠型組裝,外殼採用透明帆布設計以 增加觀賞性,蔬菜區以摩天輪方式,每排 4株共 4 排,運用直流馬達使其旋轉以達觀賞用途及保持蔬菜濕度,並搭配水牆及風扇作降溫及增濕設計,配合 LED 燈做光譜調變,將環境控 制在最適條件,左右把手設計,主要為方便搬運之用途。
控制系統和電路設計
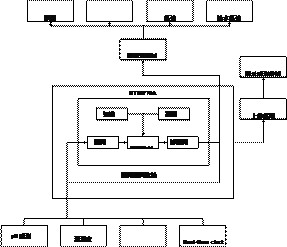
控制系統架構如圖 3 所示, 以 Holtek HT66F70A 為主要控制核心,擷取溫溼度感測器、pH感測器、RTC等訊號,輸出以繼電器控 制抽水馬達、馬達 LED 燈及風扇等,並將感測 訊號及輸出控制顯示於 LCM 上,同時上傳雲端儲存。
以Holtek HT66F70A控制晶片作為主要控 制核心,設計周邊電路,將燒錄腳、電源腳及I/O 腳為引出,以方便接線如圖 4 所示。
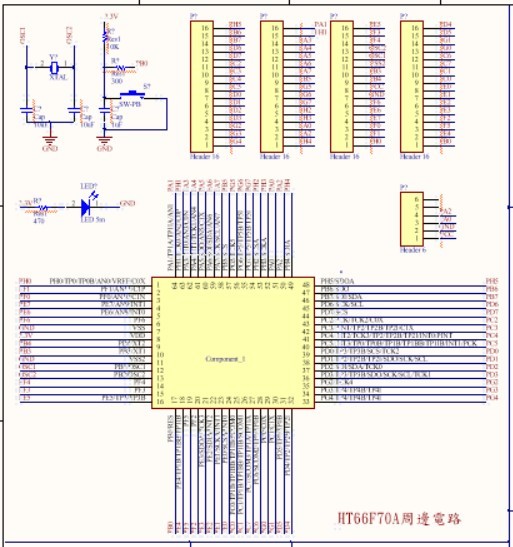
| 圖4 : Holtek HT66F70A 周邊電路圖 |
|
HT11溫濕度感測器可同時測量溫度與濕度,此感測器是屬於單線數位通訊,訊號較不易受到干 擾,最大傳輸距離可達 20 m。繼電器控制電路 用於輸出抽水馬達、馬達、風扇及 LED 燈等, 因其為大電流輸出,所以利用 TD62083 的邏輯 IC 驅動繼電器控制較大電流輸出如圖5所示。
模糊邏輯控制器設計
模糊邏輯推論是控制培養箱內之溫濕度模 糊邏輯推論說明如下:
培養箱溫度越高(V_H)則抽水馬達的時間越 長(P_H)及風扇開、培養箱溫度越低(V_L)則抽 水馬達的時間越短(P_L)及風扇關、培養箱濕度 越高(V_H)則抽水馬達的時間越短(PU_L)及風扇關、培養箱濕度越低(V_L)則抽水馬達的時間 越長(P_H)及風扇開。
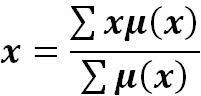
解模糊化即將模糊運算後的模糊數值轉換 為明確數值,解模糊化較常使用的有重心法、 最大平均法、加權平均法及權重式平均法等,本作品採用重心法,公式請見圖6。
程式設計
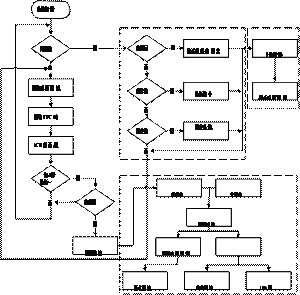
本作品程式設計控制流程圖如圖 7所示,以按鈕控制進行操作,可切換手動與自動模式,可藉由手動進行輸出,亦可設定參數使系統搭配模糊邏輯控制做最適化輸出,並將感測 訊號及輸出控制顯示於 LCM上,同時上傳雲端 儲存。
雲端控制系統設計
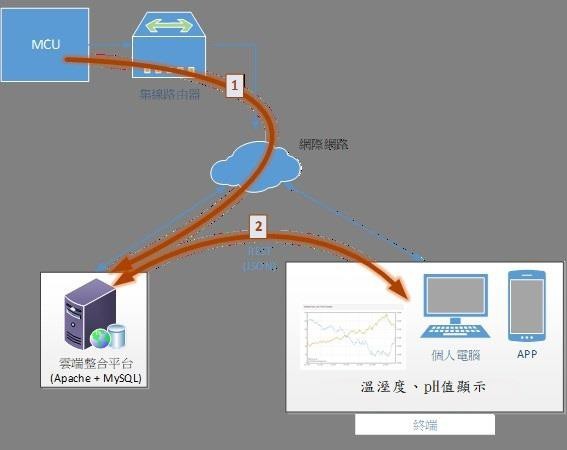
雲端控制系統架構圖如圖8所示,說明如下:
1.流程1中裝置透過 MCU 擷取量測點訊號並進行轉換,再以網路通訊模組,上傳至雲端整合平台。
2.流程 2終端使用個人電腦或行動裝置 APP 登 入至雲端資訊整合平台系統,顯示目前溫溼度資訊。
四、測試方法
本作品將擷取到的資訊至Holtek HT66F70A控制晶片內整合,以模糊邏輯推論再 解模糊化求得輸出值,並觀察箱體內、外之溫 濕度變化,本作品測試條件為自動模式,降溫條件設定為小於等於 24 °C 時關閉降溫系統、大於等於27 °C 時開啟降溫系統;pH 值以LCM 作 顯示,條件設定為 6~7 之間,高於或低於設定值,將以手動補水或排水調整;光譜亮度設定以紅藍比 10:1 為設定值;最後將資料透過網路通訊模組上傳至雲端資料庫儲存,實驗數據以每 1小時紀錄 1 次、實驗時間為 24 小時。
實驗測量
溫溼度測試 本作品於培養箱體內裝一顆溫溼度感測器作為溫濕度測量,藉以觀察箱體內部之溫濕度 變化,將資料傳至 Holtek HT66F70A 控制晶片中進行判斷。
光照度測試 本作品運用流明感測器量測光亮度,驗證本作品設定之參數是否達到蔬菜需求之光量。
pH 值測試本作品在水箱內裝設 pH 值感測器,藉以觀 察水質變化,並將數值傳至 Holtek HT66F70A 控制晶片中進行水質判斷。
雲端資料紀錄本作品將培養箱之溫溼度、光照度及pH值等資訊傳至Holtek HT66F70A控制晶片,並搭配網路通訊模組上傳至雲端資料庫儲存。
實驗結果
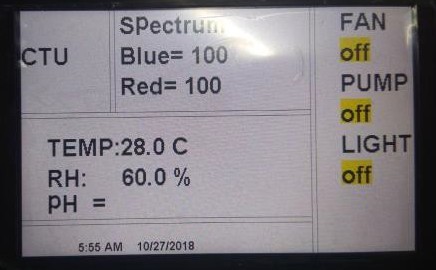
本作品成功將智慧型水耕蔬菜雲端控制系統建置完成如圖 9~10所示,本作品藉由 Holtek HT66F70A 作為主要控制核心,藉由模糊邏輯推 論可將培養箱之溫度控制於 24~27 °C 之間,pH 值及光照可依設定正常運作,並透過 LCM 作顯示如圖 11所示。
結論
本作品與市售的水耕蔬菜培養系統不同處 在於可針對不同蔬菜作光源的調整、摩天輪構造可觀賞及雲端監控;不會因外在環境變化而受影響,因此可以不必特別照顧,達到具有觀賞性及簡單培養性之功能。
(作者黃錫泉1、李祐維2、孫委呈2、曾滿英2、陳漢棋2為建國科技大學自動化工程系1教授、2學生;本文為第十三屆盛群盃HOLTEK MCU創意大賽複賽報告)
參考文獻
[1] 陳心喜,具模糊控制之預測型直接轉矩控制系統晶片設計與實現,國立台北科技大學電機工程系碩士班碩士論文,2014。
[2] 邱竣鴻,以模糊控制的電池管理系統,逢甲大學電機工程學系碩士班碩士論文,2013。
[3] 王進德,類神經網路與模糊控制理論入門與應用,全華科技圖書股份有限公司,2007。
[4] 吳向宸、林榖欽、李浩榕、李振發,機電整合應用與實習,新文京開發出版股份有限公司,台北,2012。
[5] 李聯旺、廖珗洲、謝政勳,人工智慧:智慧型系統導論(第三版),全華圖書股份有限公司,2007。
[6] L. K. Wong, F. H. F. Leung, P. K. S. Tam, and K. W. Chan, “Design of an analog fuzzy logic controller for a PWM boost converter,” in Proc. IEEE IECON, vol. 1, 1997, pp. 360–363.
[7] G. Tarun, R. R. Boudreaux, R. M. Nelms, and J. Y. Hung, “Implementation of a fuzzy controller for DC-DC converters using an
inexpensive 8-b microcontroller ,” IEEE Trans. Ind. Electron., vol. 44, no. 5, pp. 661–668, Oct. 1997.