機器視覺簡言之就如同人眼,將機器視覺應用於機器手臂上,能夠讓機器快速檢測產品,並利用擷取的影像加以分析。透過機器視覺產品-圖像攝取裝置,將被攝取目標轉換成為圖像信號,並傳送給影像處理系統,再根據圖元分佈及亮度、顏色等資訊,轉變成數位化信號;圖像系統對這些信號進行各種運算來抽取目標的特徵,並獲取目標資訊。
在工業自動化上也廣泛的取代人眼的品質檢測,由於近年願意從事3D,即骯髒(dirty)、危險(danger)及辛苦(difficult)工作的人力減少,且基於薪資逐漸調漲的原因,以人眼來檢測產品缺陷的方式除了無法完全準確外,也需要消耗許多工時及人力;而機器視覺則是以光學檢測機台快速精準定位生產線上的產品,並進行品質瑕疵等檢測。機器視覺的導入除了效率較高-可以快速檢測產品優劣外,且機器可以24小時運轉、工作無須休息,因此也不會有超時工作的問題。

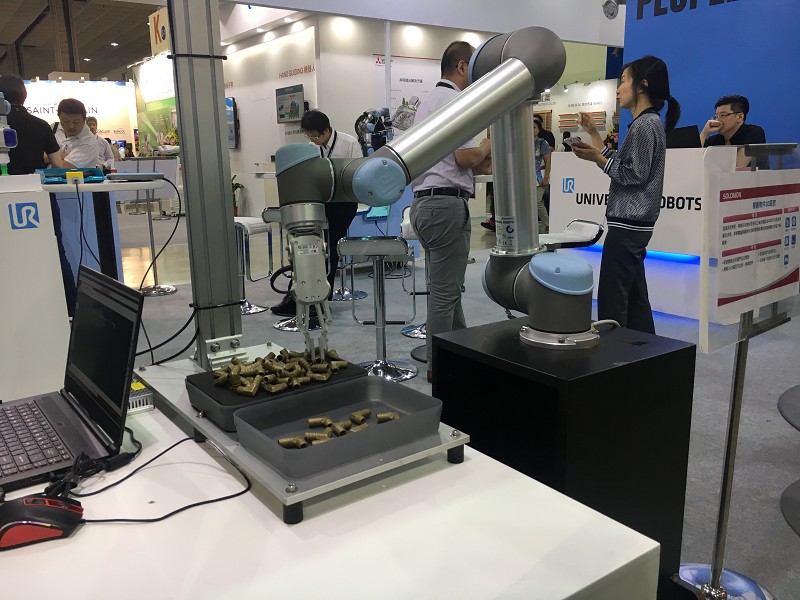
| 圖1 : 機器視手臂結合視覺隨機夾取物品。(攝影/施莉芸) |
|
機器視覺的應用層面非常廣泛,從自動化工廠到手機人臉辨識解鎖、無人車偵測前方上,機器視覺都是其中十分重要的角色。在瑕疵檢測方面,機器視覺被大量用於工業、電子業、食品包裝及醫療上,從汽車車件缺件檢查、O環有無檢查、車件孔位有無檢查,到食品及飲料包裝,個人用品及消耗品檢查,以及電子產業及零件檢查。
機器視覺的原理及應用
針對機器視覺與機器手臂的整合,皕像科技經理柯璟銘指出,以往機器手臂的應用多是固定型,如傳產或定點夾取,雖然也可以取代許多人力,不過他指出,現在夾取也越來越走向智慧化,由於搬運已經不只在固定位置,因此會搭配眼睛(相機)讓它動態變化,所以後來就會在機器人上外掛2D相機以調整X Y軸。
機器視覺應用於手臂的方式,主要是先將相機其手臂定位校正分析,確認兩者座標相同後,以相機拍攝目標物,並且分析其中的內容,再使手臂抓取。
相較於將機器視覺相機懸掛於定點,再使機器手臂抓取的方式,目前讓相機外掛於手臂上是主流作法的原因,柯璟銘表示,主要是因為掛於機器手臂活動的彈性較大。他指出,若將相機懸掛於定位,則相機所能拍攝範圍僅限於其下方;然而,外掛(或內建)於手臂上,則能夠使相機跟著手臂走,將不受範圍的限制。
而3D相機的出現變是為了因應深度(Z軸)的變化,此種應用稱為Bin picking(一個一個bin取樣),讓機器人在抓取物體時,可以依深度抓取,物品可以堆疊也可以不用擺正、擺平。
不過相較於2D相機,3D相機的應用在台灣仍然佔少數,目前仍以2D相機為主流。柯璟銘指出,主要原因為3D相機在與機器手臂的整合上仍有許多困難,由於3D相機加入深度的應用,導致機器手臂無法準確地與相機同步,目前皕像主要用手眼校正作為解決方案;此外,成本也是原因之一,3D相機成本較高,因此目前使用它來取代人力的產業,多為附加價值高、利潤高,或高科技產業。
機器視覺於各國之應用
柯璟銘指出,對於機器視覺的應用,皕像也努力在開發不同面向的視覺應用,他表示,目前也考慮將相機從傳統定焦,改為可以調焦或自動對焦,主要是看到未在IoT上視覺發展的層面。

| 圖2 : IDS Ensenso 3D立體相機,中間為投影器。(source:皕像科技) |
|
此外,他也補充,現在3D視覺的已經不只用於工廠內的Bin picking,在澳洲也將3D視覺活用於畜牧業的定位,如農場擠奶作業便需要不只是平面X、Y軸的前後移動,也需要深度方面的上下移動;此外在日本也被大量用於物流業;而台灣也有將機器人搭配視覺,應用於醫療業做手術的案例。
柯璟銘認為,2D相機內視覺的改變及3D相機,都是能夠創造使相機跨出工廠的機會。
機器視覺與工業手臂的整合已成為智慧製造的趨勢,為因應現在少量多樣的製造趨勢,相較於以往定點工作的機器手臂,無論是在夾取的物品判斷,或放置、堆疊等運作上,附有視覺功能的機器手臂更具彈性,未來運算速度提升後,將逐漸成為未來主流。