摘要
當汽車靜止後發生駕駛人或乘客因開啟車門,以致撞倒機車騎士的交通事故時,將使騎士受傷甚至可能被其它行進中車輛輾過導致嚴重傷亡。在此方面目前市面上已經有在車門側邊裝上LED燈閃爍警示的方法,提醒後方騎士汽車車門正在開啟中。
然而,經檢視所有此種交通意外事故可發現,其發生原因通常都是機車已在汽車車門旁,汽車駕駛人或乘客未注意而開啟車門,導致直接撞傷騎士,故在車側加裝LED燈警示方法僅能警示後方來車,無法警示已在車門旁的車輛。為了解決此問題,必需藉由電機機構的快速動作來輔助人類判斷及不當的動作行為,以預防此類憾事再度發生。因此,本文提出主動式車門開啟防撞系統,由於此系統是利用紅外線感應器,來判斷後方及車側來車,非由駕駛人或乘客來判斷,故稱為主動式。
此主動式車門開啟防撞系統,使用HT66F70A 微控制器作為判斷及下達鎖住車門的控制命令,透過在車內的門鎖把手上,裝置觸摸式感應開關,來啟動此系統,此系統在車門外的門把附近,裝置長距離與短距離兩種不同偵測距離的紅外線感測器,分別判斷後方及車側是否有來車,再利用自行設計,由單向軸承、動作軸心與電磁鐵組成的無段式車門制動機構,使車門在被鎖住時只能往回拉,無法向外推的狀態。此動作機構亦考慮到當汽車遭遇撞擊時,此系統必需解除動作,且車門必需長時間解鎖,使人員可儘速逃生或等待救援。
1. 前言
目前的交通工具在設計上,如未注意到使用上的安全問題,對其他行人或車輛造成危險,將發生一些不可預期的意外事故。目各國政府都使用法規及一些交通安全措施,來減少交通意外事故的發生。目前汽車的製造商,也意識到民眾對安全的需求遠超過售價,故近年來在新車的設計上,也增加了很多車載安全裝置,企圖減少意外事故發生的機率。在眾多種交通意外事故中,很多的意外事故皆是汽車駕駛人或乘客應注意但未注意而造成的,在這類的交通意外事故中,最常發生也常出現在媒體版面的,即是汽車駕駛人或乘客在下車時未注意後方機車行駛路線過於接近車門,不經意開啟車門,造成車門撞擊到機車,而使騎士倒地傷亡的問題。因此,最近交通部也修法要求汽車駕駛人或乘客在開車門時,必需使用兩段式開啟車門方式,注意車側及後方是否有來車,否則發生事故時將予以重罰。
為預防此類交通事故的發生,目前已有專利針對此問題提出了一些解決的方法[1]–[4],其大部分多為被動式。所謂被動式的車門開啟防護裝置,即是防護系統作動後,還是需要人為的判斷,才能發揮作用。因此,被動式的方法並未能有效解決人為判斷疏失的問題,此類產品大都以大多數是以警示燈閃爍、影像、警報器等被動方式來做警示動作,如將LED燈置於車門側邊,或是利用方向燈或煞車燈的閃動方式來警示後面來車。
然而,此種方式,除了用路人要特別注意車輛的閃燈警示外,只能警示在警示燈後方來車,最常見的是當車門開啟時,藉由裝置在車側高亮度LED燈的閃爍,警示後方來車或行人避免撞擊,然而此種解決方式只能防範機車騎士距汽車較遠,注意到閃燈並來得及反應改變行車路線,才能防止此類交通事故的發生,若機車騎士未注意到LED燈,或距離汽車太近來不及反應,此法則無法有效的防止此交通事故的發生。但是觀察此類交通事故的案例,發現都是機車騎士已經行進到門邊或距離門後不遠處,才會被正在開啟的車門撞倒,從後方撞到開啟車門,撞擊車門或將車門撞飛的事故較少,因在車門旁邊的騎士,在汽車車門開啟時是來不及反應的。
為有效地解此問題,經詳細探討其事故發生原因可發現,因機車行駛速度及汽車駕駛人或乘客開門速度很快,超出人類可即時反應的速度,且所有的汽車駕駛人或乘客,有時會忘了開啟車門前,要注意後方是否有來車。故若能藉由電機機構來替代人類做判斷,在即將發生事故前,快速地防止車門繼續往外開,將可減少意外事故的產生。故本次實驗提出使用紅外線感測器偵測車門外的來車,並使用微控制器做快速的邏輯判斷來替代人為的判斷,一旦紅外線感應器感應到車門後方或側方有來車,不論車門是否正在開啟中,車門制動機構將立即制止車門繼續往外開啟,但能使汽車駕駛人或乘客,即刻拉回車門。故此法可減少汽車駕駛人或乘客非故意突然開啟車門而造成的意外事故,此主動式車門防撞裝置的反應時間及判斷邏輯都比人為判斷來的快速又準確。
此系統在最差的情況為當機車騎士已到車門邊,汽車駕駛人或乘客正好開啟車門到接近騎士處,此系統位於車門最外側的短距離紅外線感側器偵測到物體,HT66F70A將下命令使該門制動,無法再往外開啟,此狀況可能會使騎士受到一些驚嚇,但因車門未撞到騎士,機車有很大的機會不會傾倒;倘若發生騎士因受驚嚇使機車倒下的情況,也較被車門撞擊後倒下傷害小了許多。
雖然此系統可有效防治因汽車駕駛人或乘客正好開啟車門而發生的意外事故,然而本文所提之主動式車門開啟防撞系統,擁有一個在目前已發表與此作品類似的專利中,都沒有考慮到的功能,即是當汽車在行進中發生如遭遇其它車輛撞擊、車輛撞護欄…等意外事故時,此車門防撞系統將不可以防礙駕駛人或乘客逃生及救援的功能。
為了達到此目的,本系統在實做上利用水銀開關(亦可以重力感測器(G-sensor) 取代),並配合偵測汽車蓄電池充電電流大小的電流感測器,來判斷汽車目前所處環境。當電流感測器由充電狀態變成停止充電狀態,且水銀感測器動作時,表汽車發生意外事故,此系統必需停止運作,解除車門鎖定機制,使乘客及駕駛人容易脫困。當然也考慮到若經過坑洞而造成水銀開關動作時,因汽車仍在行進中,仍有蓄電池充電電流,此狀況為則非為汽車發生撞擊事故,故此系統在一小段時間後將予以忽略。
2. 工作原理
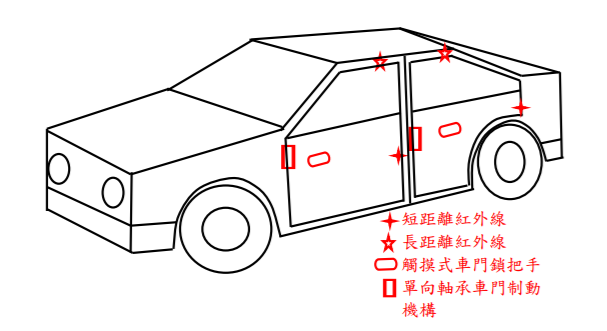
本系統在硬體方面,採用HT66F70A微控制器做為控制核心,當駕駛人或乘客欲開啟車門時,碰觸裝置於車門內側的觸摸式門鎖把手時,即可喚醒主動式車門開啟防撞系統。系統的紅外線感測器使用PT2248及PT2249來加強及穩定紅外線的偵測距離;根據紅外線感測到車門外車流的狀況,來控制裝置於車門板金內的單向軸承制動裝置,來制動車門使它無法再繼續往外開啟,本系統硬體裝置於汽車上的位置如圖1所示。
在圖1中每個車門上的長距離及短距離紅外線模組,分別用於別偵測後方是否有來車,以及車門旁邊是否有來車。若紅外線感測到有來車時,隨即利用自行設計包含電磁鐵的單向軸承制動機構來制動車門。平時電磁鐵是處於未通電狀態,當電磁鐵通電時,會將軸承鎖住使車門無法再往外開,但能往內拉回關閉車門。
為了節能及防止誤動作發生,此主動式車門開啟防撞系統,在車門內側的門鎖把手上安裝了觸摸開關,當觸摸開關感測到駕駛人或乘客,觸摸到門鎖準備下車時,將使此主動式車門開啟防撞系統內的HT66F70A微控制器,從休眠狀態中被喚醒,以節省不必要的能源耗損。喚醒後HT66F70A微控制器開始接收,每個車門上的兩個紅外線感測模組的狀態,並判斷車側後方及車門旁邊附近是否有來車,若偵測到來車時,單向軸承車門制動機構上的電磁鐵將被致能,令車門在紅外線感測器動作的情況下鎖住車門,使它不能再往外開啟,但能拉回關閉車門,以防止車門撞傷機車騎士,此情況一直維持到車門外的紅外線感測不到物體為止。
當汽車停在停車場內時,因車與車之間空隙狹小,車內人員下車時未注意到與旁邊車間之距離,打開車門撞到旁邊已停好之車輛,導致其板金凹陷,必需負板金及烤漆之賠償責任,得不償失。此系統在兩個長距離紅外線長時間一直偵測到有物體時,將判斷此狀況為汽車停於停車場內,此時完全改由短距離紅外線偵測旁邊的車輛,當車門開啟後,若車門距離停靠於旁邊的車體太近時,HT66F70A微控制器將令單向軸承制動機構內的電磁鐵激磁鎖住車門,不可再繼續往外開啟,防止駕駛人或乘客因開門撞擊到旁邊車輛,鎖住後系統開始計時,於一小段時間後解鎖,因為在停車場內,通常車與車間的走道很小,車門鎖住時等同告訴乘客快撞到旁邊的車,接下來車門不可開太快,否則將撞到旁邊的車輛,解鎖後乘客可慢慢再繼續往外開啟方便下車。
另外,當在行駛中或停止的汽車遭到撞擊時,亦即汽車發生交通意外事故,都必需解除系統運作,讓乘客可儘速下車離開現場。此兩種狀況可利用裝置在車上的水銀開關 (可以重力感測器代替),以及蓄電池的充電電流偵測器兩者的狀態來判斷。
其中水銀開關偵測汽車是否遭遇撞擊,但是有時汽車行經坑洞時也會觸發水銀開關作動,此種狀況為非撞擊事故必需排除。充電電流感測器則是判斷汽車是在行駛中或是靜止狀態。當水銀開關動作及充電電流感測器由充電變成停止充電狀態,表示汽車在行駛中遭遇撞擊;另外,若原本充電電流感測器處於不充電狀態,水銀開關動作,表示在停車時,遭遇其它車輛撞擊,以上兩種狀況表示汽車發生意外事故,HT66F70A微控制器下命令將單向軸承車門制動機構上的電磁鐵,保持斷電解鎖狀態,使車門可自由活動,不會因此系統動作鎖住而影響後續駕駛及乘客逃生及救援工作。
本系統內之單向軸承車門制動機構,為整個系統較困難的部分,因無法直接在市面上購得完整成品,必需自製,故先利用AUTOCAD設計機構圖,在市面上購買單向軸承及電磁鐵,經許多次製做試驗後,才得到所需的功能,完成整個單向軸承車門制動機構。紅外線感測器的部分則根據設計電路[5]–[7],並依所需的感測距離設計電阻及電路內元件,即可達成所需的感測距離,以同一電路獲得長、短感測距離的目的,對於後續電路維護及製造成本來說,可有效降低此為一個優點。然而,在感應不同距離的物體上並不一定只能使用紅外線,其它諸如微波及超音波…等亦可。此外,目前生產的汽車有些本身已配置車側盲點偵測系統,可將其訊號與本系統連結,使其在汽車停止時感測訊號切換到本系統內,可取代前述長距離紅外線的功能。本文所提出之主動式車門開啟防撞系統,其所有構思、硬體設計及軟體控制邏輯皆為本團隊討論及開發的成果,目前向經濟部智慧財產局申請發明專利及實體審查中。
3. 作品結構
3.1 主動式車門開啟防撞系統硬體結構
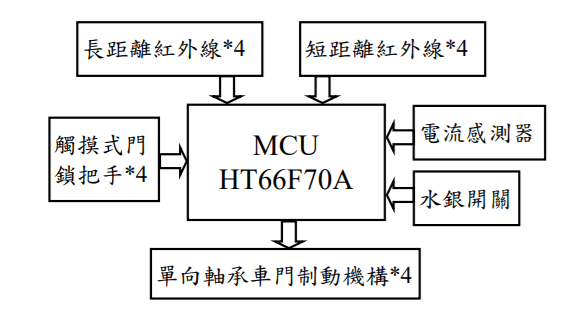
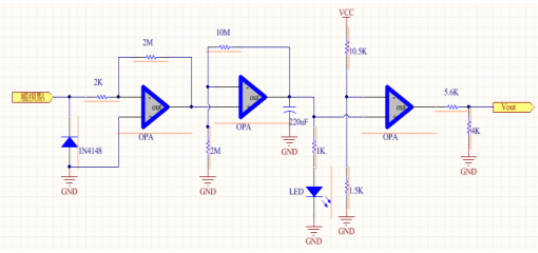
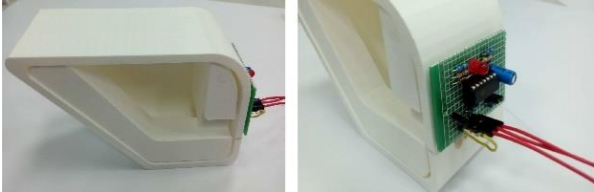
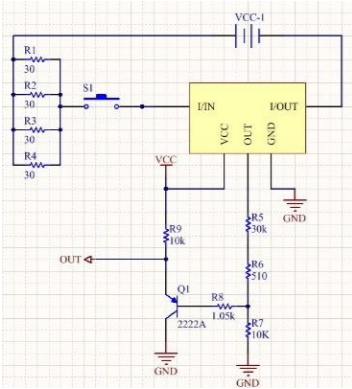
本系統的控制核心是使用盛群半導體所製造的微控制器(MCU) HT66F70A,其整體系統方塊圖如圖2所示。在這些週邊電路中,由觸摸式開關組成的喚醒電路如圖3所示,因其觸摸訊號較小故需使用多級放大器放大訊號,除電路外其硬體把手部分,則利用3D印表機印製仿實車的車門門鎖把手,裝上觸摸式開關後之實體如圖4所示。
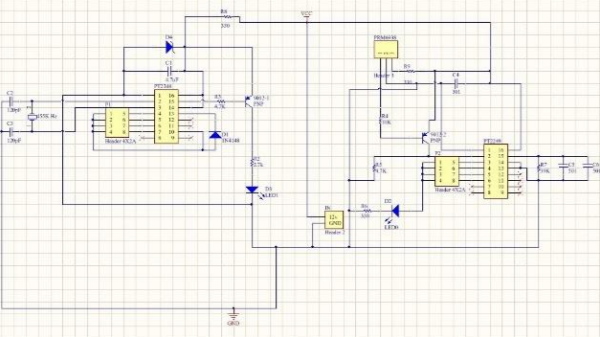
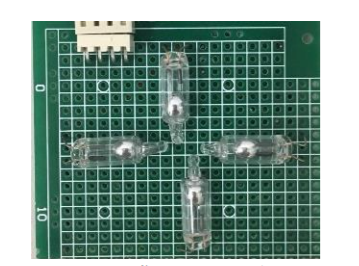
偵測車門外是否有物體的長距離及短距離紅外線感測電路之電路圖如圖5所示,其中長距離紅外線模組功能為偵測後方是否有來車接近;短距離紅外線模組功能為偵測車門旁是否有物體,其實體圖如圖6所示。偵測汽車本體是否遭遇撞擊之雙軸水銀開關實體圖如圖7所示,此亦可使用取代重力感測器電路取代。
偵測汽車是否處於行駛狀態的充電電流偵測電路,是以ACS712電流模組所組成,此模組是利用霍爾檢測原理來感測電流,其輸出電壓為100mV/A,其電路圖如圖8所示,為模擬蓄電池充電電流,在此以高功率水泥電阻模擬蓄電池負載,其實體圖如圖9所示。
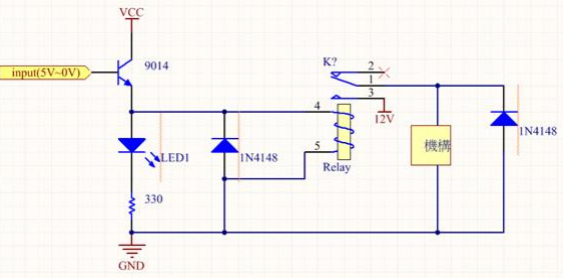
最後是單向軸承車門制動機構,主體是以單向軸承、電磁鐵及動作軸心所組成的車門鉸鍊,經多次試驗後其最後實體圖如圖10所示,此機構為結合車體與車門並可制動車門之重要機構,單向軸承車門制動線圈的驅動電路如圖11所示。最後,整體系統組合後實體如圖12-14所示。

| 圖12 : 整體系統實體模型圖(a):以木板組裝車體模型整體外觀 |
|

| 圖13 : 整體系統實體模型圖(b):車門內部零件 |
|

| 圖14 : 整體系統實體模型圖(c):HT66F70A及模擬蓄電池充電電流模組 |
|
3.2 主動式車門開啟防撞系統軟體控制邏輯
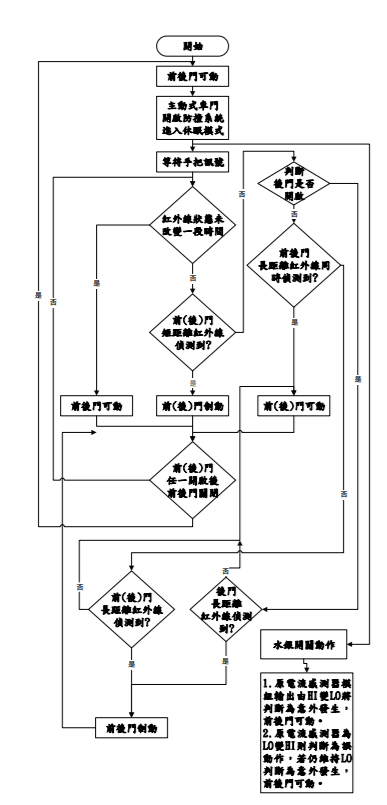
1. 系統通電後,所有車門未制動可正常開啟或關閉,HT66F70A微控制器進入休眠模式。
2. 當任何一扇車門的觸摸式開關有訊號或者水銀開關接收到訊號時,HT66F70A微控制器解除休眠模式,表示車內乘客欲開啟車門或有異常情形發生。
3. 當HT66F70A微控制器解除休眠之後,開始接收所有感測器(水銀開關、左前車門長距離紅外線模組、左前車門短距離紅外線模組、左後車門長距離紅外線模組、左後車門短距離紅外線模組、右前車門長距離紅外線模組、右前車門短距離紅外線模組、右後車門長距離紅外線模組及右後車門短距離紅外線模組)的回傳值,做為車門制動的依據。
4. 當所有的紅外線模組都沒有偵測到物體,且水銀開關未接收到訊號,所有車門未制動可正常開啟或關閉,此表示車輛周圍無偵測到物體,可放心下車。
5. 當水銀開關接收到訊號,同時偵測到蓄電池充電電流,表示車輛可能發生意外事故,此系統將自動解除車門制動的功能,以使駕駛或乘客可儘速逃生或順利被救援。
6. 當任一扇車門的短距離紅外線模組偵測到物體,且水銀開關未接收到訊號時,則將使該扇車門的電磁鐵致能制動車門,使車門無法再繼續往外推,但可往回拉。
7. 例如:
(1)當左前車門短距離紅外線模組偵測到物體時,則左前車門將被制動無法往外推但可往回拉。
(2)當左後車門短距離紅外線模組有偵測物體時,則左後車門將被制動無法往外推但可往回拉
(3)當右前車門短距離紅外線模組及左後車門短距離紅外線模組有偵測物體時,則右前車門和左後車門將被制動,無法往外推但可往回拉,此表車側有物體離車門很接近,只要一開門就會撞到,因此執行制動車門的動作。
此系統HT66F70A控制流程如圖13所示。
4. 測試方法
本系統通電後,所有車門未制動可正常開啟或關閉,HT66F70A微控制器進入休眠模式。
情況一:車子在行駛過程中可能發生意外,所以將不會執行車門制動的動作,以確保人身安全。
當水銀開關及蓄電池充電電流感測器同時偵測到訊號,等待一段時間過後,HT66F70A微控制器進入休眠模式。
情況二:車輛兩邊皆有其它車輛經過,此時前座乘客要下車。
1. 若乘客觸摸左右兩側任一個前車門的觸摸式門鎖,則HT66F70A微控制器開始接收四個車門各別的長距離及短距離紅外線共八個感測器訊號(展示時只使用一邊四個),以及每個車門微動開關訊號共四個。
若左(右)側四個紅外線感測器皆無偵測到物體,不制動左(右)側任一個車門,待左前(或右前)任一個車門開啟(微動打開)後,再偵測到四個車門皆關閉(微動關閉) ,接著系統進入休眠模式。
2. 若四個車門的某個長距離或/及短距離紅外線偵測到物體,則無論該車門是否開啟,該車門上的電磁鐵動作,使車門無法往外推但可往回拉,待該車門長距離及短距離紅外線皆無偵測到物體,該車門電磁鐵斷電,車門可正常作動,待左前(或右前)任一個車門開啟(微動打開)後,再偵測到四個車門皆關閉(微動關閉) ,接著系統進入休眠模式。
情況三:車子停在停車場或路邊,左側或右側有其它車輛或牆壁,此時乘客要下車。
若乘客觸摸四個車門任一個觸摸式門鎖把手,HT66F70A微控制器開始接收四個車門各別的長距離及短距離紅外線共八個感測器訊號(展示時只使用一邊四個),以及每個車門微動開關訊號共四個。若左前及左後車門(或右前及右後車門)長距離紅外線同時偵測到物體,但短距離紅外線未偵測到物體,左側(或右側)的兩個車門皆僅由短距離紅外線來偵測車側是否有物體。
1. 若該側兩個短距離紅外線感測器皆無偵測到物體,不制動該側兩車門,等待四個車門至少一個有打開(微動開啟),然後四個車門都關上(微動關閉),接著進入休眠模式。
2. 若該側兩個短距離紅外線有偵測到物體,該車門上的電磁鐵動作,使車門無法往外推但可往回拉,待該車門短距離紅外線無偵測到物體,該車門電磁鐵斷電,車門可正常作動,待四個車門至少一個有打開(微動開啟),然後四個車門皆關閉(微動關閉),系統進入休眠模式。
情況四:當車輛兩邊皆有其它車輛經過,此時後座乘客要下車。為了預防前車門長距離紅外線因偵測到後門而誤動作,因此前車門的長距離紅外線功能在本情況下失效,且後車門的長距離紅外線將同時控制前車門。
若乘客觸摸左右兩側任一個後車門的觸摸式門鎖,HT66F70A微控制器開始接收兩個後車門的長距離紅外線,及四個車門的短距離紅外線(展示時只使用一邊二個)共六個感測器訊號,以及每個車門微動開關訊號共四個(展示時只使用一邊二個)。
1. 若六個紅外線感測器皆無偵測到物體,不制動左(右)側任一個車門,待左後(或右後)任一個車門開啟(微動打開)後,再偵測到四個車門皆關閉(微動關閉),系統進入休眠模式。
2. 若左右兩側任一個後車門長距離紅外線有偵測到物體,則該側前、後車門的電磁鐵同時通電制動,使兩車門無法往外推可往回拉,等待該側後車門長距離紅外線無偵測到物體,該側前、後兩個車門的電磁鐵同時斷電,兩車門可正常作動,待左後(或右後)任一個車門開啟(微動打開)後,再偵測到四個車門皆關閉(微動關閉) ,系統進入休眠模式。
3. 若左側及右側任一後門的長距離紅外線無偵測到物體,但個別的短距離紅外線有偵測到物體,則該車門的電磁鐵通電制動,使該車門無法往外推可往回拉,等待該車門短距離紅外線無偵測到物體=>該車門的電磁鐵斷電,該車門可正常作動,四個車門的任一個車門開啟(微動打開)後,再偵測到四個車門皆關閉(微動關閉) =>系統進入休眠模式。
情況五:若左側或右側的前、後乘客皆要下車時,系統動作方式則如情況四所示。
情況六:若長距離紅外線一段時間內一直感測到物體,亦即偵測到之物體沒有在移動時。
在前述情況二~情況五中,若是因長距離紅外線感測到物體而制動車門時,經所設定的一段時間後,長距離紅外線仍然一直保持感測到物體的狀態,則解除該車門制動。
5. 實驗結果及討論
為了預防汽車車門撞擊騎士的交通意外事故再度發生,本文提出主動式車門開啟防撞系統,使用機電裝置輔助人為判斷,當駕駛人或乘客應注意而未注意開啟車門,即將撞到機車騎士時,利用單向軸承的無段式車門制動機構來制動車門,使車門不能外往開,但能往內關閉。此系統亦可應用於停車場內,因未注意到旁邊車輛距離太近,開啟車門時撞到旁邊車輛,導致板金凹陷,需負賠償責任的不幸事件。本系統使用HT66F70A為控制核心,HT66F70A具有GPIO高輸出電流且容易控制,以及程式撰寫容易的優點,以此來完成所有的邏輯控制,測試時每個元件及每項功能皆依設計的動作正常作動。此系統亦考量到若汽車停止中或靜止時發生撞擊事故時,此系統必需不能影響駕駛人或乘客的救援或逃生,故當系統感測並確認為意外事件發生時,會解除系統控制,使車門可自由開啟。
(本文作者為明志科技大學電機系王勝寬教授、童柏翰、陳立諺、邱承穎、黃柏翰)
文獻
[1] 王圳木,”智慧型汽車開門防撞系統”,新型專利M540067號,2017。
[2] 曾憲正,莊昌霖,蘇哲淋,張家豪,”汽車開門防撞警示系統”,發明專利I568615號,2017。
[3] 黃志仁,” 汽車車門防撞警示改良裝置”,新型專利M524279號,2016。
[4] 梁定鈞,陳柏宏,” 汽車車門防撞偵測裝置”,新型專利M520484號,2016。
[5] Princeton Technology Corp., Infrared Remote Control Transmitter PT2248 Datasheet, ver. 2.7, June 2005.
[6] Princeton Technology Corp., Infrared Remote Control Receiver PT2249A/PT2250A Datasheet, ver. 2.3, Dec. 1999.
[7] 李宗杰, 楊林泰, 李濬彥, 楊皓宇, 賴柏爾, 99學年度「專題製作」成果報告:紅外線結合單晶片控制直流馬達, 元培科技大學生物醫學工程系, 2011年5月11日, pp. 10.