人類未來的移動方式,將與今日截然不同!汽車將不只是移動工具,還會變得有智慧,可協助人類駕駛、幫忙找停車位與建議行車路徑等,甚至提供代駕的服務。目前車廠積極開發先進駕駛輔助系統(Advanced Driver Assistance Systems, ADAS)與車聯網科技,ADAS賦予車輛感應辨識能力與車輛操控權,可提醒駕駛並主動介入車輛操控,而車聯網賦予了車輛聯網溝通能力,增加駕駛便利性。車廠在ADAS與車聯網這兩大基礎上,發展自動駕駛科技,研發人工智慧與3D圖資定位技術,多國政府也規劃自駕車政策與環境,積極推動自駕車上路。
ADAS與車聯網發展現況與未來趨勢
一、安全法規與車輛評價推動,ADAS快速發展
ADAS主要提升車輛安全與便利,產品包括盲點偵測、前方碰撞預警、後方碰撞警示、交通號誌辨識、夜視系統、停車輔助、主動巡航、車道偏離警示與駕駛狀態偵測等。由於民眾需求與各國陸續訂定法規強制安裝ADAS產品,帶動相關商機快速成長,2018年最受矚目的法規就是美國安裝倒車顯影與歐盟安裝緊急求救系統。根據SBD調查,2015年ADAS商機約30億歐元,2020年將翻倍成長至72億歐元。
ADAS發展也正由「被動」變得「主動」,過去ADAS功能通常僅能「警示」駕駛人,近年來各車廠開始發展主動式ADAS,例如盲點偵測與車道偏移警示過去僅能透過聲音或震動警示,目前可進一步在緊急時刻介入車輛控制,避免危急事故。
ADAS項目也被全球各區域新車安全評鑑協會列入安全評分標準,如EuroNCAP 2014年已將自動煞車列入評分項目,2016年納入車道偏離警示與車速輔助系統,預計2018年納入夜視系統;JNCAP 2014年同樣納入自動煞車,2016年納入盲點偵測系統與後方防撞警示系統,預計2018年納入夜間行人警示與車道偏離警示。
二、智慧便利需求,車聯網服務興起
美國運輸部(DOT)2016年12月宣佈推動車輛強制安裝V2V設備,開始籌備相關法案,目前已展開DSRC設備驗證測試作業,預計在新法實施後,車聯網會加速普及。
車聯網分成兩個部分,一是車輛對雲端或可攜式裝置採用LTE、Wi-Fi或藍牙連線,著重非即時性服務;二是車輛對環境採用DSRC連線,強調即時性服務,前者的應用已趨於普及,未來重點為智慧地圖連線,車輛可預知前方交通情形(塞車、限速路段、施工或積雪)與地形狀況(急轉彎或下坡等),提醒駕駛人注意路況減速或提早變換車道,避免緊急情況並輔助節能駕駛。
表1:各車廠車聯網發展現況 |
廠商/產品 | 車聯網發展(應用內容) | 發展階段 |
Apple CarPlay
Google Android Auto | 各自發表CarPlay與Android Auto車載資訊系統,提供通話、音樂、地圖導航、簡訊等功能。 | 2016年起配合部分車款陸續推出 |
BMW Connected Drive | 具有緊急求助服務、道路救援服務與主動遠距售後服務,可檢測車輛位置、維修保養資訊等,適時提醒駕駛注意安全。 | 已上市 |
Mercedes connect me | 提供自動緊急通報系統,也可利用智慧型手機確認停車位置,遠端操作車輛上鎖、解鎖、空調設定與確認剩餘燃油量等。 | 已上市 |
GM V2V互聯網系統 | 開發V2V互聯網系統,使相互接近的車輛之間能夠藉由發送接收位置、速度、行駛方向等資訊,提高主動安全性。 | 預計2017年推出 |
Ford SYNC Connect | - 車門上鎖與解鎖
- 啟動車輛,包括可預設啟動時間
- 檢查車輛狀態,如油量、機油、電池容量,以及胎壓數據
- 定位車輛位置,顯示在手機地圖上
| 預計2017年推出 |
Honda CONNECT | - 根據即時交通狀況,提供推薦行車路線及準確預測到達時刻等導航服務。
- 車載感應器會自行診斷的車輛訊息和故障訊息,將狀況通知特約服務店,提前進行車輛維護和修理的準備工作。
| 發展中 |
Audi 駕駛輔助系統 | 可利用GPS判斷道路狀況,做駕駛模式調整建議。 | 發展中 |
(資料來源:新聞媒體,ARTC彙整) |
推動自動駕駛上路,車廠投入關鍵技術與建立試驗場域
一、目前自動駕駛等級處於Level 2~Level 3,全自動駕駛則完成專用道路測試
依據2016年9月美國國家公路交通安全管理局(NHTSA)發布的全球首份官方自動駕駛車政策(Federal Automated Vehicles Policy),自動駕駛分級採用國際自動機工程師學會(SAE)定義,分成Level 0~Level 5共6個等級如下所示。
SAE自動化程度定義 |
等級 | 名稱 | 定義 | 方向盤及加減速的操作 | 行駛環境監視責任 | 系統負責的行駛模式 |
0 | No
Automation | 駕駛員完全掌控車輛。 | 駕駛員 | 駕駛員 | 無 |
1 | Driver Assistance | 車載自動系統有時能夠輔助駕駛員完成某些駕駛任務。 | 駕駛員和系統 | 駕駛員 | 固定的行駛模式 |
2 | Partial Automation | 車載自動系統能夠完成某些駕駛任務,與此同時駕駛員需要監控駕駛環境,完成其餘駕駛任務。 | 系統 | 駕駛員 | 固定的行駛模式 |
3 | Conditional Automation | 自動系統既能完成某些駕駛任務也能在某些情況下監控駕駛環境,但是駕駛員必須準備好當自動系統發出請求時重新取得駕駛控制權。 | 系統 | 系統 | 固定的行駛模式 |
4 | High Automation | 自動系統能夠完成駕駛任務並監控駕駛環境,駕駛員不需要重新取得控制權,但自動系統只能在某些環境和特定條件下運行。 | 系統 | 系統 | 固定的行駛模式 |
5 | Full Automation | 自動系統能夠完成駕駛員在所有條件下能完成的所有駕駛任務。 | 系統 | 系統 | 所有的行駛模式 |
(資料來源:Marklines、SAE,ARTC整理) |
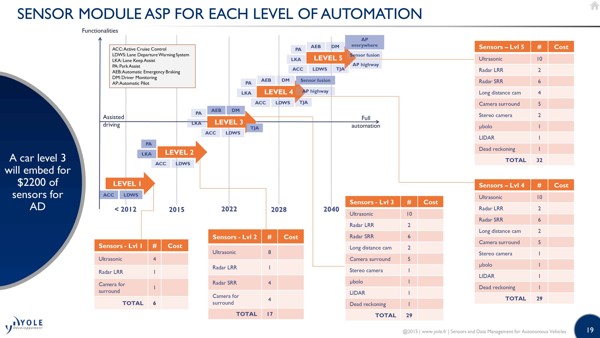
根據法國研調機構Yole報告,現階段自動駕駛程度在Level 2~Level 3階段,平價車廠多在Level 2,豪華車廠到Level 3,預計自動駕駛2028年可到Level 4,2040將達到完全自動化Level 5,同時感測器數量也會隨自動化程度提高而倍增。
目前已有多家車廠的自動駕駛可在專用道路測試,但普通道路環境複雜,必須有3D高精準度地圖與人工智慧輔助。由於牽涉科技範圍甚廣且深,眾多車廠與科技廠選擇結盟合作,如Honda與Google聯盟、Audi結盟NVIDIA,BMW則與Intel、Mobileye合作,各科技廠與車廠說明如下:
各科技廠與車廠合作情形 |
Intel | Intel於2017年CES展前發表自駕車設立的Intel Go,該平臺可整合汽車電子、5G網路、雲端運算等技術,並宣佈將攜手BMW 40部內建Intel Go平臺的自駕車車隊於年底上路測試。 |
NVIDIA | NVIDIA發表Xavier自駕車用超級電腦,與 Audi 一同合作開發 AI 汽車。Xavier是一台擁有512核Volta GPU的自動化AI平臺的電腦,它會透過觀察人類駕駛者和深度學習來學習駕駛,並有雲端儲存的高清地圖資料在後面支援。Tesla也與NVIDIA合作開發新一代自動輔助駕駛,這項功能已開始用於轎車和運動型休旅車款上。 |
Google | Honda提供測試車輛,搭載Google的自動駕駛技術,同步加入測試車隊,在美國4個城市進行道路測試。 |
(資料來源:新聞媒體,ARTC彙整) |
二、繪製3D地圖,雲端比對提升定位精準度
國際車廠評估普通道路的自動駕駛,定位誤差必須控制左右低於0.1m,前後低於0.5m的範圍內,在沒有3D地圖的比對下,誤差值難以低於1.5m。因此車廠發展3D圖資系統,例如Toyota推出「高精準度地圖產生系統」,在車輛搭載3D雷達,連續採集空間圖資,上傳雲端中心建構3D地圖。另外9家日本整車廠也於2016年成立Dynamic Map Planning,目的在2020年前繪製日本的3D道路地圖;德國車廠也買下Here地圖,透過行駛中的車輛提供路面訊息與感測數據,擴展即時智慧導航與自駕車等商機。
| 圖2 : Toyota高精準度地圖產生系統示意圖。(資料來源:Toyota) |
|
三、訓練人工智慧,提升電腦駕駛技巧
自動駕駛從Level 4到Level 5,最大不同就是Level 5完全由人工智慧自行駕駛,必須有辦法處理任何交通狀況,Toyota評估能在普通道路使用的人工智慧程度,必須能預測個體的動作與其移動路線,若遇無法判斷之情形必須有能力自行蒐集資訊作為操控判斷依據,並能基於經驗對應從未遇過之交通狀況。
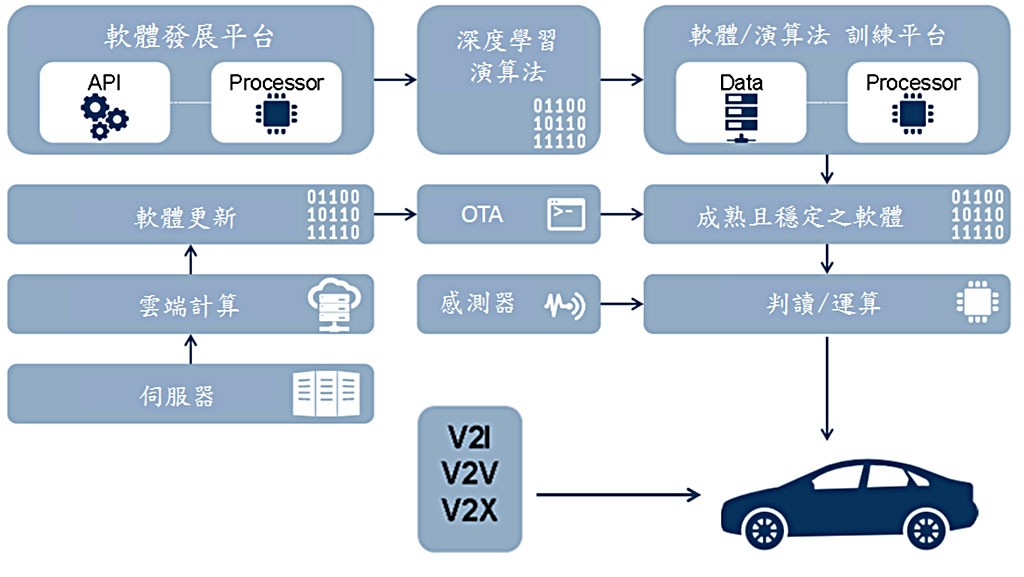
人工智慧軟體架構多為深度學習(Deep Learning),透過類神經網路演算法,使機器具有自主學習的能力,能仿造人腦複雜的圖形辨識工作。深度學習運用在自動駕駛車輛上的過程如下圖,在車輛硬體端,必須搭配硬體建立軟體發展平台,確保本身之演算邏輯符合規範,能與其他控制硬體即時溝通。在雲端連線方面,自動駕駛車輛必須以聯網方式保持軟體更新狀態。最後,車輛感測器將提供即時路況給運算電腦,並搭配V2I、V2V及V2V之功能,幫助車輛計算並判讀正確決策。
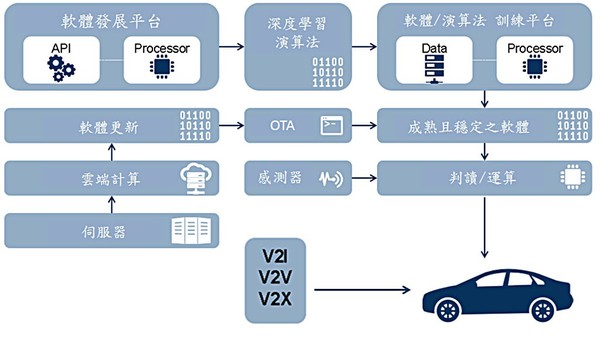
| 圖3 : 深度學習運用在自動駕駛車輛上的過程。(資料來源:Frost & Sullivan,ARTC整理) |
|
根據NVIDIA的研究,人工智慧訓練12個月後即能在沒有明顯號誌的道路中自動行駛,駕駛能力已能媲美人類,且持續進步當中。
四、建立極端環境測試場域,確保自動駕駛正常運作
為確保自動駕駛能在各種極端情況下正常運作,各國政府與車廠建立測試場域,設計極度複雜測試情境如暴雨與雪地等,目前最具代表的場域為美國Mcity及瑞典AstaZero。
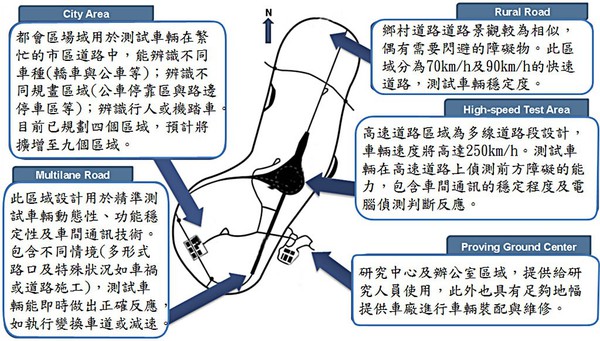
Mcity位於美國密西根州,車道總長約5英里,設置多種道路設施與路邊設施模擬實際道路環境如下圖所示,路段包括有高速公路、坡道、轉彎、十字路口、地下道及碎石路等;路邊設施則有人行道、長凳、路燈、交通號誌、交通指示牌、交控設施、障礙物、建築物等,使得模擬程度趨近真實,並將智慧交通系統納入自動駕駛測試內容,於道路旁設置DSRC通訊協定設施。Mcity也利用高緯度地理位置,在冬天測試自動駕駛於雪地運作情形。
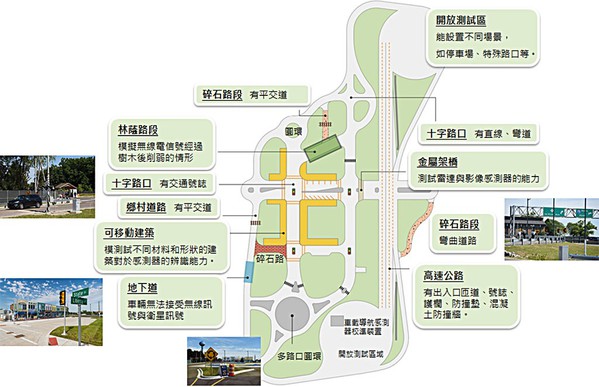
| 圖4 : Mcity場域配置圖(資料來源:Frost & Sullivan、ARTC整理) |
|
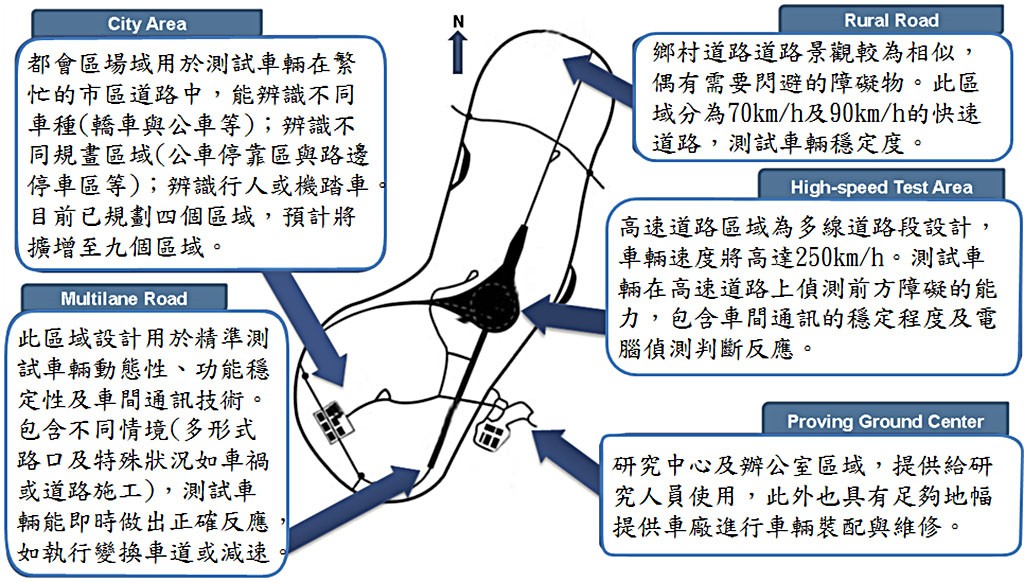
AstaZero位於瑞典布羅斯,占地500英畝,場域囊括各式道路交通狀況,增設隧道、造霧機與造雨模擬測試區,並建設光纖通訊與電源供給設備以測試車聯網通訊技術,相關配置如下圖。
| 圖5 : AstaZero場域配置圖(資料來源:Frost & Sullivan,ARTC整理) |
|
自動駕駛的未來議題
自駕車上路還有許多規範仍待制訂,目前各國政府對自駕車正面看待,積極討論上路辦法,例如德國希望推動自駕車2020年合法上路,已開始定期辦理跨部門會議溝通,將自駕車分成六個層面執行,分別是路網標準、上路法規、前期測試、智慧交通、網路安全與大眾接收度,並規劃道路交通法規納入自動駕駛,駕駛人只要正確使用自動駕駛就不受到處罰,討論車輛與駕駛的責任釐清,以及面對道德兩難時的處理方式。
法規也是很大的挑戰,目前較高階的自動駕駛輔助功能僅能在美國上路,例如自動跟車,但在多數國家,法規並不允許駕駛分心開車。為了發展自動駕駛產業,美國密西根州允許沒有方向盤、沒有剎車、沒有駕駛人的自駕車上路測試與銷售,並著手制訂相關產業規範。
現今自動駕駛議題政府與車廠雖喊得很熱,但民眾接受度卻是很大問號。預估隨著自動煞車成為強制法規,許多與自動煞車共用硬體(雷達、鏡頭)的ADAS系統如主動巡航或車道偏離警示也會一同裝載,使人們逐漸習慣自動駕駛帶來的便利性,將有助提升民眾對自駕車的接受度。
自動駕駛車初期僅會在特定場域服務,若要應用各種道路,其技術認證、駕駛執照的取得與保險方式必須重新設定;自動駕駛車若要普及,車輛搭載的感測軟硬體必須有合理價格與高信賴度,軟體如雲端數據、3D地圖與人工AI必須成熟,支援自駕車的環境建設也都必須完整。
ARTC自駕關鍵技術,引導國內車輛產業升級
ARTC研發多款ADAS技術媲美國際車廠,例如車道跟隨系統與自動緊急煞車等,電腦可根據駕駛環境進行操作,達到SAE自動化定義的Level 2等級。影像辨識是自動駕駛關鍵,ARTC已運用上述提及的深度學習建立人工智慧,發展影像辨識模組,可有效辨識路上行人與非行人物體。
ARTC也融合車輛電腦控制、感知辨識與車聯網等多種技術,打造停車場域自動輔助駕駛系統,駕駛人可在特定位置下車,透過行動裝置指示車輛進入停車場,自行尋找空的車位並自動停車,取車時亦只需在門口呼叫,車輛便會自行前往駕駛位置。

| 圖6 : ARTC自動駕駛輔助系統。(資料來源:ARTC) |
|
車輛智慧發展商機龐大,ARTC可協助國內廠商發展自動駕駛車相關關鍵技術,協助產業升級。值得注意的是,國內廠商在與國際車廠合作時,由於車廠對於商機掌握性極高,廠商應著重在雙方合作後的加值商機,選擇雙方有利的合作方式。