一般車想要突破人力操控的限制,讓機器代替作業,得需要數十種系統來協助,為什麼呢?因為在交通上,有多種路況需要被克服,例如大雪、暴雨、飛塵、十字路口等,什麼是真正的障礙物?車道線在哪?這些皆非單一的感測器能夠做到。
首先,為了促進汽車對周遭環境的理解,一張高精度的地圖是不可少的,它和一般的導航地圖有什麼差異呢?導航地圖的資訊範圍涵蓋較廣,除了最基本的道路訊息外,還會提供周遭建築物的尺寸、用途等,由於是專給人類使用,因此偏向資訊娛樂系統所屬。
| 圖1 : 毫米波雷達發射的無線電波,能有效探測金屬。(source: Amundaray Instrumentos Geotecnicos) |
|
| 圖2 : 毫米波雷達發射的無線電波,可以根據發出和收回的時間差計算出目標距離。 (source: Amundaray Instrumentos Geotecnicos) |
|
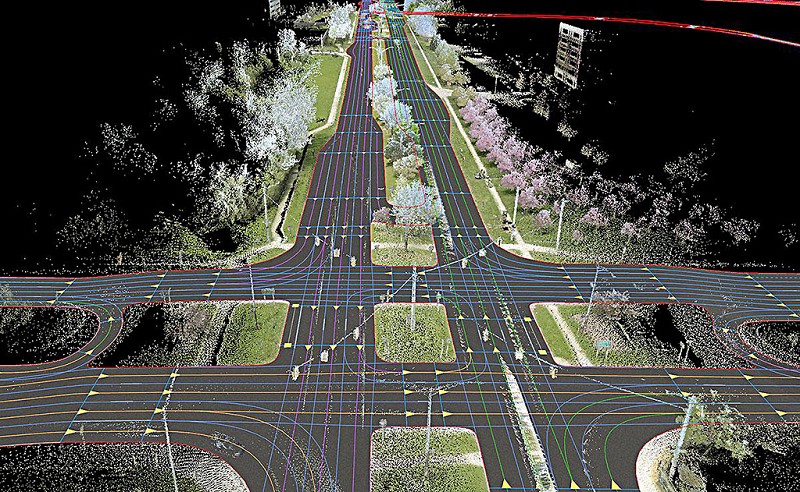
而高精度地圖則相關不同,它的目的是輔助機器感測環境,幫助車輛進行定位、規劃路徑,所以要知道當前的座標(X,Y,Z),並知道這條路徑的車道線有幾條,虛線和實線的分布狀況,此處為普通道路、匝道,還是高速公路,行車速限等。以上的資訊,多屬於可預測,並可以事先取得,不會在短時間發生變化,所以能夠先行收集,同時也包含了道路曲率、坡度以及?坡角等,因此高精度地圖的複雜度比導航地圖更高了許多。
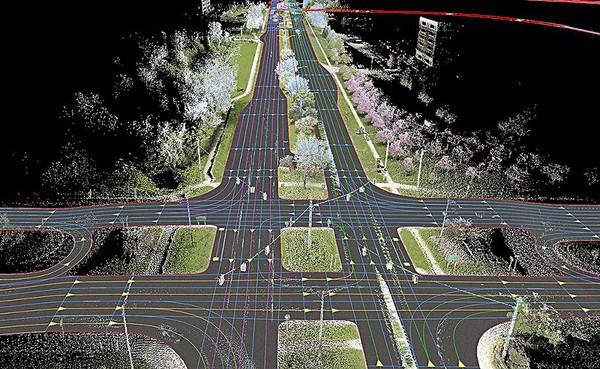
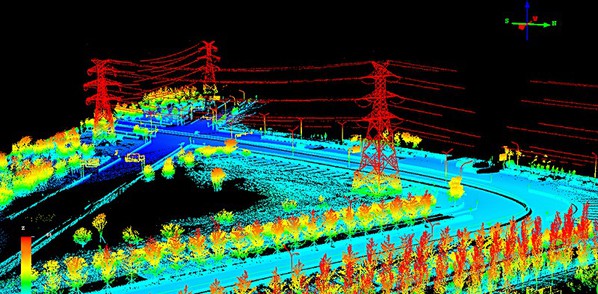
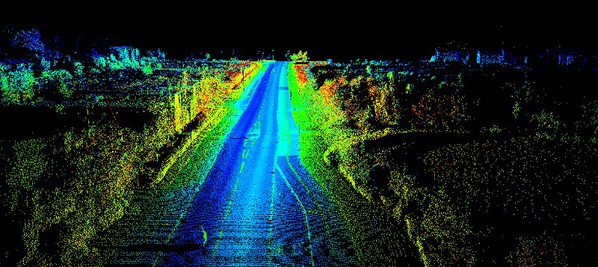
| 圖3 : 高精度地圖將會收集道路曲率、坡度以及?坡角等詳細資訊,提供汽車視角。(source: Automotive News) |
|
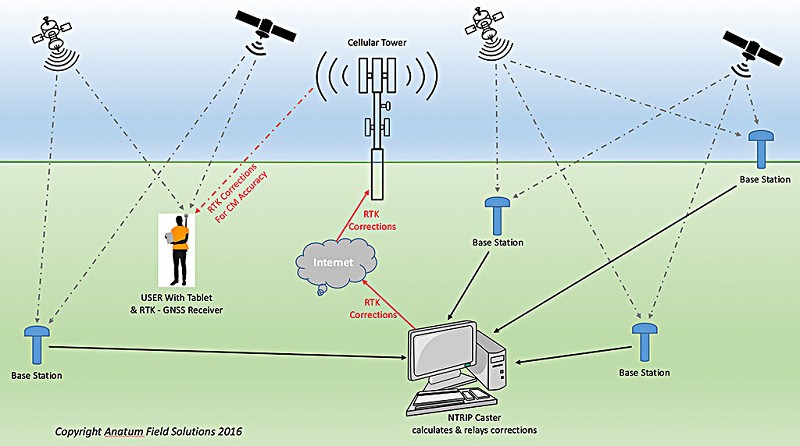
由於受到衛星軌道誤差、衛星鐘差誤差等因素影響,傳統衛星導航系統現在多需於地面建立地基增強站,以定位算法獲得定位數據差分資訊,再進行大範圍播發,幫助汽車實現高精準定位。而目前業界所採用的GPS-RTK載波相位差分定位技術,可使定位準確度縮小至厘米級,能夠克服強風、磁場、光電等干擾。
毫米波雷達探測周遭物輪廓
另一項不可或缺的設備則是感測器,早期是使用超音波雷達,能夠有效偵測2公尺範圍內的障礙物,如今已提升到5公尺長,一般車輛在前後皆有裝設,以便在泊車時向駕駛預警,5米探測範圍的雷達能夠滿足自動輔助泊車所需,但其反應速度較慢,範圍不長。
接著毫米波雷達出現了,雷達發射的無線電波,能夠有效探測金屬,並根據發出和收回的時間差計算出目標距離。目前主流是採用24GHz及77GHz,77GHz的解析頻寬為1GHz,頻寬大小,關係到你可以解析到多小的物體尺寸,頻寬越高,越能讓你停駛進更小的空間,而不致於撞傷。
現今又多了單/雙眼攝影機,彌補了雷達無法判斷目標的問題,也可以進行車道線識別,雙眼攝影機雖然能獲得更豐富的訊息,但由於成本高,因此目前多採單眼攝影機居多,進一步的應用為車道偏離預警、車道保持以及自動緊急煞車等。然而對於沙塵、強雨、強光等自然因素,都會有識別失誤的問題。
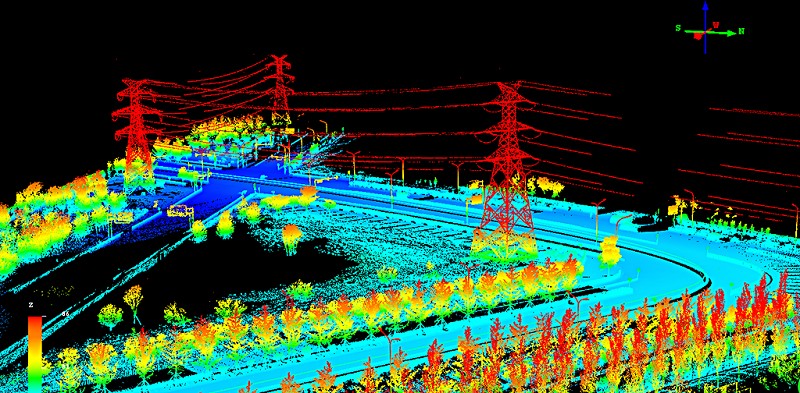
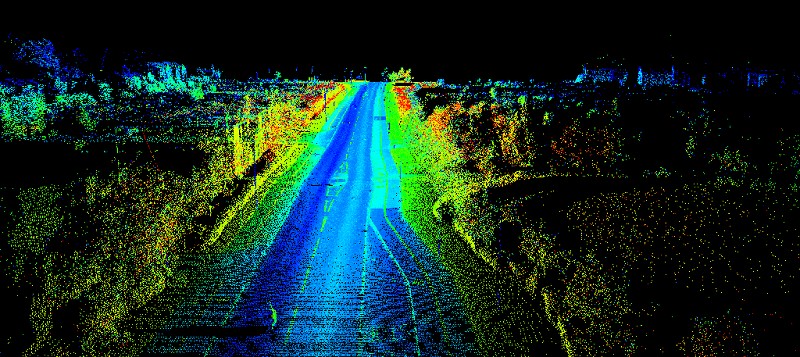
而光學雷達(Lidar),則能夠取得更精準的周遭物體形狀,它是一種光學遙感技術,當雷達模組發射雷射光到目標物後,會使用如三角測量法等方式對比雙方位置,取得目標距離以及反射強度。未來的趨勢之一,是將不同感測器所取得的數據融合在一起,以得到最完整的資訊。
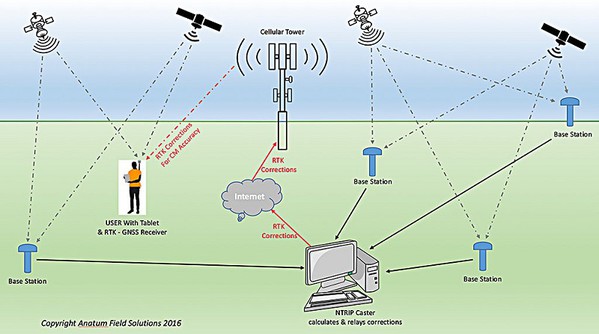
| 圖4 : GPS-RTK載波相位差分定位技術,可使定位準確度縮小至厘米級,能夠克服強風、磁場、光電等干擾。(source: Anatum Field Solutions) |
|
每種不同的雷達會安裝在不同的位置,如超音波雷達會布置於車輛的周圍,以偵測四周的障礙物,攝影機則多裝置於擋風玻璃下方,當雷達警告車主離障礙物有兩公尺時,它所傳遞的距離是以自身感測器所測量的距離。
因此若要實現精準,就必須轉換座標至自身座標系下才行,為了達到訊息一致化,當毫米波雷達、超音波雷達、攝影機分別感測到前方有一輛車時,必須將訊息結合,才能告訴系統前方只有一輛車,而非三輛。
現階段的汽車智動化
美國車廠特斯拉(Tesla)過往所發表的AutoPilot功能,並未搭配高精度地圖,而是以智能化的自適應巡航控制系統(ACC),以及車道保持輔助系統(LKA)、感測器為主。
自適應巡航控制系統是從巡航控制技術的基礎上發展而來,當車輛行駛時,安裝在車輛前方的車距感測器會持續掃描車輛前方道路,同時採集車速信號,當與前車之間的距離過近時,自適應巡航控制系統可以透過ABS、發動機控制系統控制車輪轉速,並降低發動機的輸出功率,讓車輛間得以保持安全距離。
車道保持輔助系統,則用來控制剎車的協調裝置。當車輛行駛時,可以透過攝影機來識別行駛車道的標示線,如果車輛接近標示線並脫離車道時,系統則會透過方向盤的振動、聲音來提醒駕駛。當前的系統多是在自適應巡航、車道保持和自動煞車等功能的基礎上融合鏡頭和雷達的技術為主,早期多為被動警告,近年則漸趨為自動控制。
不同的系統也搭配不同類型的車用感測器,包含毫米波雷達、超音波雷達、紅外雷達、雷射雷達、CCD \CMOS影像感測器及輪速感測器等,來收集車輛的工作狀態及其數據,並將改變的機械運動變成電參數(電壓、電阻及電流)。
舉例來說,車道偏離警告系統使用CMOS影像感測器、夜視系統則使用紅外線感測器、適應性定速控制通常使用雷達、停車輔助系統則會使用超音波雷達等。
發展自動車的困難之處
目前標準是將自動駕駛分為L0至L5,其中L0指的是人工駕駛,L5則是完全不需要人類介入,即可解決所有可能面臨的公路情況。目前的技術多半停留在L3之間,它可以在特定速限下,人類不需要緊握方向盤,查看當前路況,而僅需在系統通知時,接手方向盤的控制權。
2016年,特斯拉發生一起因Autopilot功能限制所導致的車禍,當時因為感測器無法準確辨識十字路口的車輛,而發生的公共安全問題。因此奧迪(Audi)便加強光學雷達以增加識別率,但因為光學雷達的成本實在過高,並非每家車廠都願意採用;而凱迪拉克則是增加監視器,監視駕駛的臉部是否面向前方道路。
未來要達到L4、L5的狀態,則仰賴前述所提到高精度地圖,並且要時時更新,因此,未來每輛車不僅用於正常行駛,還得肩負著蒐集地圖資訊的責任,並將訊息反饋給其他自動車的任務。
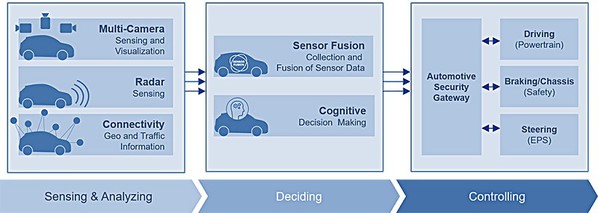
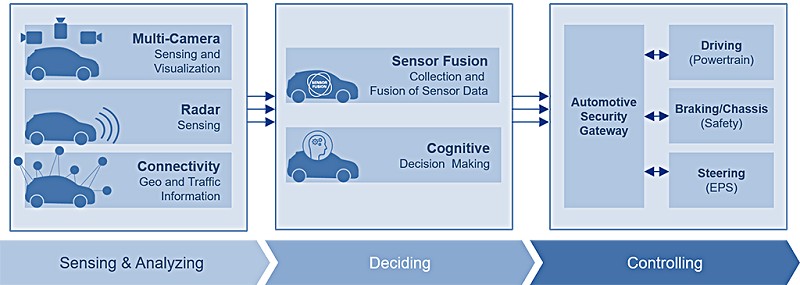
| 圖5 : ADAS透過感測器、毫米波雷達、高精度地圖收集資訊,以因應多變路況。(source: Renesas Electronics) |
|
在全球的ADAS市場中,最為知名的開發商非來自以色列的Mobileye莫屬,就連特斯拉、奧迪、BMW、豐田等都搭載它的產品,市值高達85億美元,幾乎佔據汽車安全駕駛領域中70%以上的市場。
最初此公司是開發一套視覺系統,以減少交通意外的發生率,爾後出產的前碰撞預警(FCW)、前方車距監測與預警系統(HMW)、車道偏離預警系統(LDW)、行人探測與防撞系統(PCW)等幾乎成為汽車標準配備,當中有80%是屬於前裝產品。
同時大者恆大,在與各家廠牌的合作中,也收集了千百萬公里的道路資訊,以及氣候、路況、跨國駕駛場景等,增強了Mobileye的核心演算法。
雖然距離下一代L4普及還有一段時間有走(約於2025年實現),但今日已不只有傳統車廠投入研發,而是中、美科技大廠也相繼投入,例如百度、阿里巴巴、Uber、Google等,在沒有量產的壓力下,技術的突破將更為迅速。
**刊頭圖片:特斯拉(Tesla)的AutoPilot功能,配有智能化的自適應巡航控制系統(ACC)、車道保持輔助系統(LKA)以及感測器。(source: Electrek)