近幾年,智慧型車輛的報導相當多,自動駕駛和先進駕駛輔助系統(ADAS)的技術提升與相關課題,相信之後也持續備受關注與討論。現階段,相當多的汽車大廠,均不遺餘力的投入自動駕駛的軟硬體開發,目前包括降低事故的剎車系統、車輛行駛時車道偏離警告、行車視線盲點警告、維持行車路線輔助等,相信在最後,也將會全面導入高安全性的自動駕駛系統(圖1)。

| 圖1 : 全球汽車大廠均不遺餘力的投入自動駕駛的軟硬體開發。(source:CLICCCAR) |
|
在2018巴黎車展上,豐田汽車豐田章夫社長表示,在開發自動駕駛系統的過程中,包括模擬行駛與延伸的相關測試,相信必須進行超過1400萬公里以上。而對於自動駕駛開發一直不遺餘力的GOOGLE,在過去6年之間就已經累積400多萬公里的測試。
全球汽車業者相競投入先進駕駛輔助系統開發
在過去數年中車用的電子零組件持續激增,以目前來說,在車輛中被作為標準零件的電子產品已經佔了整體車輛零件比的40%,未來確信還會持續的增加,例如包括ADAS的安全性系統、TCU的電子控制系統、車用資訊娛樂系統、電子視鏡系統等,除了減少耗能之外,最大的目的還是以行車安全為主要目標。
當然伴隨著所使用的零組件範圍擴大,加入的供應商也隨之增加,例如以電子視鏡系統為目標的美國Gentex就加入此一市場,而PANASONIC也隨後跟上(圖2)。此外,以高階配備為訴求的抬頭顯示器(Head Up Display, HUD)這個領域,也吸引著眾多日本業者相競投入開發生產。

| 圖2 : PANASONIC積極投入符合ADAS所需的車用顯示產品(source:PANASONIC) |
|
在追求先進輔助駕駛系統下,例如本田在2017年第三季末發表一款新增加先進輔助駕駛系統8項功能中的停車輔助系統(避免倒車誤觸)與適路性車燈系統(Auto Hi-Beam),藉以提高駕駛者的行車安全。
這款新發表的輕型車系N-BOX,在本田汽車所稱的「Honda SENSING」系統功能中,將77GHz的微波雷達整合到前水箱罩內,並且在前水箱罩的內部上方安裝了一部單眼相機,可以對前方、對向以及行人進行影像感測,來達到事故避免的目標。
Honda SENSING系統原本就涵蓋了8項安全設計,包括:
一、 前方車輛以及步行者闖入安全範圍時,立即自我啟動剎車功能
二、 防止誤入行車檔位
三、 步行者事故降低
四、 行駛方向偏離
五、 前方車輛追撞預防
六、 維持行車路線
七、 前方車輛起步行駛通知
八、 標誌辨認等的功能性
其中的第三項步行者事故降低方面,還有為了避免與步行者發生碰撞時,啟動方向盤自行轉向的能力。
本田汽車在N-BOX所新增加的停車輔助系統(避免倒車誤觸)與適路性車燈系統(Auto Hi-Beam),更是讓「Honda SENSING」系統的安全性,再往上提升一個層次。避免倒車誤觸功能方面,是為了在倒車行進時,對油門進行誤踩的預防,而並非是與後方障礙物有關。在排檔桿被排入R(倒車)檔時,當因為誤踩油門踏板而出現快速提升倒車速度時,這時引擎的動力輸出就會受到控制,進而避免人為因素所發生的無謂事故。而Auto Hi-Beam部分則是利用在前水箱罩內的單眼相機,來對前方車輛的尾燈及對向車輛的頭燈進行感測,並且可以自動調整該車頭燈的投射角度,避免頭燈的投射對前方車輛與對向車輛帶來刺眼或炫目的影響(圖3)。

| 圖3 : 本田在新發表的車款中增加了攝影機、感測器與雷達,來強化「Honda SENSING」系統(source:本田汽車) |
|
動態地圖扮演先進駕駛輔助系統無形助力
在日本,除了各大汽車廠卯足全力開發ADAS相關的硬體系統與零組件外,在軟體與智慧化系統也有相關業者相近投入開發,這其中又以動態地圖系統最受關注,動態地圖在先進駕駛輔助系統中扮演相當重要的基礎能力,同時也被認為是自動駕駛中Level 3以上的等級,各個業者無不以在2020年實用化為目標而加速努力開發各項技術,尤其是最大的基礎技術—動態地圖。
目前駕駛者行駛車輛的過程中,大多是依賴地圖或者是導航設備來決定行進方位,除此之外,幾乎都是靠自己的視覺與聽覺來掌握與判斷行車過程中的各種情況,例如,紅綠燈的顏色信號、道路施工看板,以及步行者或其他的周遭車輛的移動等,時時刻刻都必須專注在各種動態變化,來確保行車的安全性,而相同的,在未來即將被開發的全自動駕駛輔助系統中,也必須將這些訊息加以感測與分析,這時,除了透過車上的各種感測器或雷達來獲取各項必須的情報外,更需要將這些情報配合交通法規、道路施工訊息、交通事故通報等變化加以整合,才能夠大幅度提升全自動駕駛車輛的行車認知度。
而這樣的認知能力基礎,需要讓立體(3D)地圖的能力與資料具備高精度完整性,而這些完整性的資料必須仰賴汽車業者、車用電機業者、地圖資料業者、量測業者來共同合作,完成此一動態的基礎地圖資料庫。
構成動態地圖的4個階層
以目前來說,幾乎所有的導航地圖資料庫中,都僅僅只是記載了區域內的道路路線而已,更先進一點的,還能從雲端系統中獲得當時的交通流量與固定被規範的各種管制,但是,這和實際的道路上各種變化還是有相當程度的不同,包括新道路的開通、道路施工等,各式各樣的狀況都持續性的出現與發生,這種時時刻刻都出現變化的道路資訊,就必須依賴具有即時更新能力的動態地圖來彌補。
因此動態地圖中,涵蓋了4個不同情況的階層,包括周遭車輛、信號等瞬息萬變的「動態狀況」、變化較小的交通事故、壅塞、氣象等情報的「準動態狀況」、交通管制、道路施工等預先可以獲知的「準靜態狀況」,以及長時間被管制或變更的「靜態狀況」(圖4)。
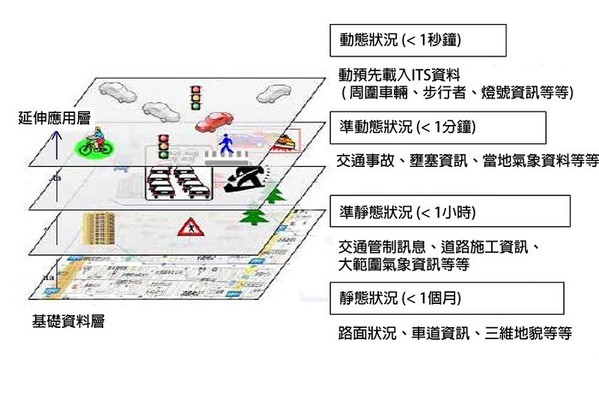
| 圖4 : 利用4個不同狀況階層構成動態地圖(source:DYNAMIC MAP PLATFORM) |
|
就技術能力來看,「靜態狀況」資訊,大多數的汽車業者都有能力將這些資料,以下載更新的方式,儲存在利用GPS的導航或圖資的資料庫之中。但這也僅僅只是可以預先提供給駕駛者一個行駛方向或變更路線的建議和引導,當然這些情報與行車方位的精準度,會和汽車業者投入資料庫的研發與生產成本有著正比的關係。
更先進一點的新款車種,還會再加上各種的感測器來配合高精度經緯度方位,正確地計算出實際的行車位置,而以極小誤差與不斷修正來進行行車導引的功能。但是,就如前述,例如各個道路的天候狀況、車流量等,卻是無時無刻都在變化,也都不盡相同。這時即使是裝配最先進的感測器,也無法能夠完全的進行辨識分析,或者因為需要不斷的運算,而加重系統的負擔,造成情報輸出延遲。
如果在導航或駕駛輔助的資料庫中,能夠預先獲得道路標誌、停止線等的地貌資料,就能夠大幅度減輕行車系統的運算負擔,以及獲得感測器無法感應到較遠的相關資訊。可是並非所有的汽車業者都能夠認同這些論述,也是有部分的汽車業者認為,只要配備了感測器與攝影系統的話,根本不需要這些預告資訊。
透過三維群點資料和高精度方位資訊完成向量地圖
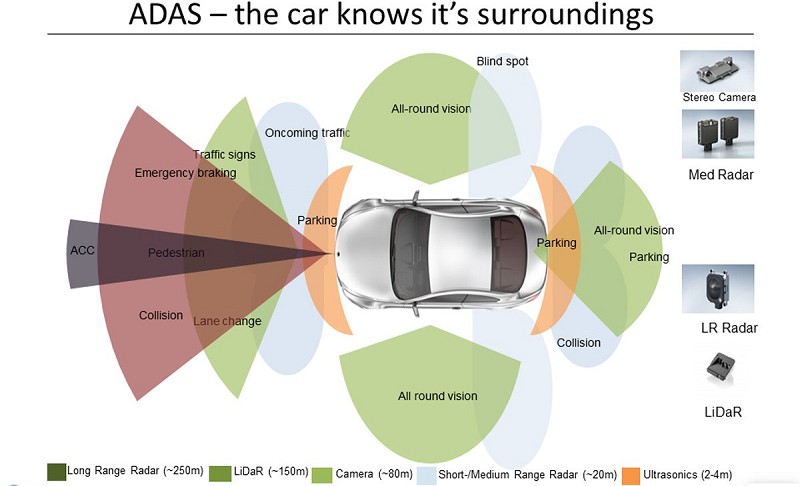
不過,大多的行車輔助系統或資料軟體業者都相信,僅僅依靠感測器或攝影單元,仍舊存在相當大的風險。以感測器為例,大多價格成本可以被接受的LiDaR感測器,能夠偵測到的前方距離大約是150公尺左右,超過150公尺的物件或車輛,就無法被有效感應(圖5),或者是在連續彎曲的道路上,也沒有辦法正確的感測到已經過彎的前方車輛,或尚未過彎的對向車輛,而有很大的機會,讓行車輔助系統誤判成車輛是處於安全行駛的狀態下。因此,不能說具有先進駕駛輔助系統的車輛,僅依賴高階感測器,就能夠在自動駕駛的情況下完全沒有安全性的疑慮,而必須認真的面對和考量不足點,再進一步的導入更多情報來補足以及提高自動駕駛的安全性。
| 圖5 : LiDaR感測器能夠偵測到的前方距離大約是150公尺左右(source:STR Service Centre) |
|
逐漸被重視的動態地圖可以預想到將會在先進駕駛輔助系統中擔任3大功能。
首先是資料預讀,透過資料預讀的功能,可以了解到前方道路的實際狀況,進而降低或增加車速,以及讓方向盤預做轉向的準備。其次,可以準確的計算出目前的行車方位和速度,在比對圖資中道路的位置後,更正確地進行車輛的行駛。最後,在駕駛控制的方面,當車輛沿著道路中線前進時,在獲得更遠的前方實際狀況後,能夠預先啟動或檢測剎車系統,大幅度的降低行車危險性。甚至可以這麼形容,動態地圖是先進駕駛輔助系統中另一個層次或狀態的感測器。
動態地圖系統除了扮演著先進駕駛輔助系統進行安全行駛的溝通外,和目前較為先進的導航產品一樣,另一方面也可以透過螢幕或投影設備,將地圖或行車資訊以三維向量作為運算的資料基礎,再透過影像的呈現方式傳送給駕駛者,讓駕駛者除了可以了解目前行車的中心位置,以及周圍的地物與障礙物狀態。
透過其他資蒐單元來整合、分析與描繪資料之所以能夠將這些所呈現的影像資料,包括路肩邊緣、交通標示、行車中心線等,並且將複雜的道路狀況予以資料庫化的能力,除了需要預先製作高精度的圖資之外,還需要搭配GNSS(衛星測位系統)、六軸加速器、陀螺儀、光學攝影機、雷射掃描器(LiDAR)等等單元所組成的移動測繪系統(Mobile Mapping System, MMS)(圖6)。

| 圖6 : 利用移動測繪專用車來完成地貌資料蒐集(source:AISAN TECHNOLOGY) |
|
透過移動測繪系統可以即時記錄當時道路的狀況或資訊,反向上傳到資料庫伺服器中,再經由廣播或下載的方式,傳遞到其他的動態地圖資料庫之中。
這些群點所在地的資料,是經由衛星測位系統來進行標定位置,這個定位資訊比起一般手機中所內建的GPS,在精度方面還要更加準確,衛星測位系統是以面積區域參數校正(Flachen Korrektur Parameter, FKP)方式來獲得定位資訊,可達到公分等級的高精度定位。
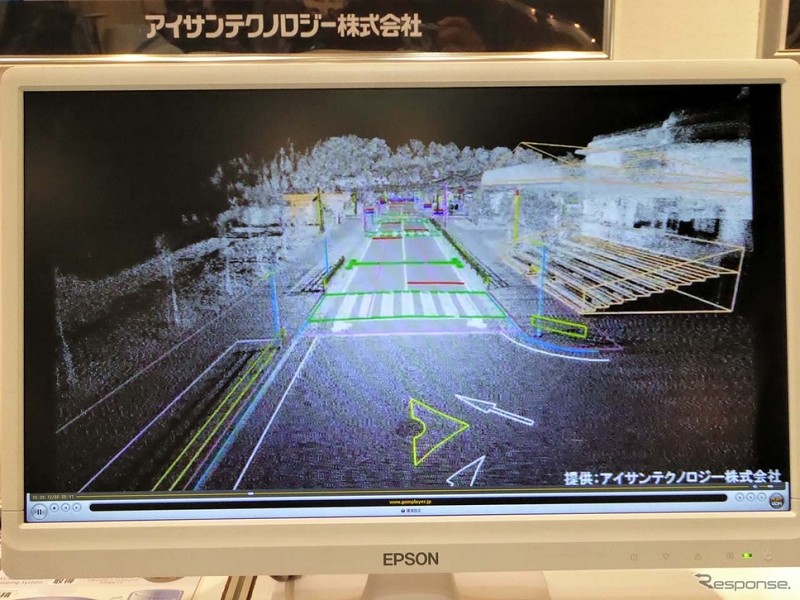
而雷射掃描器(LiDAR)在群點資料中,扮演著從衛星測位系統獲得高精度方位資料後,進行合成解析的工作,所有的點都會進行X、Y、Z座標的標定。處理後的資料再進一步的結合攝影機所拍攝到的影像,比對出有用的物件,再予以進行向量繪圖形成動態地圖中的一部分,這些完成處理後的資料,能夠快速方便讓其他車輛行經該路段時,可以準確且清楚的分辨和投射出車道線、停止線等實際的當地物件給駕駛者參考(圖7)。
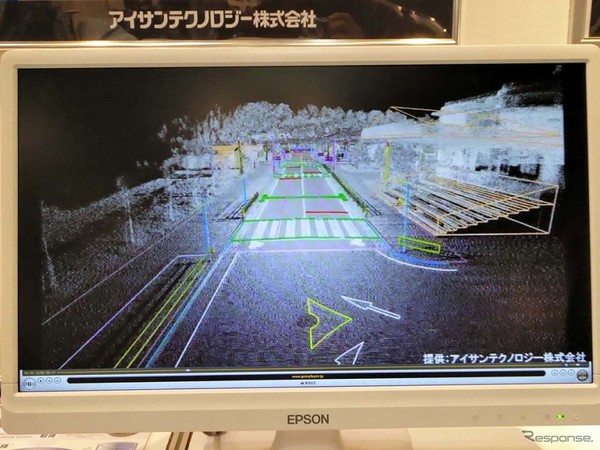
| 圖7 : 處理後的資料再進一步的結合攝影機所拍攝到的影像,比對出有用的物件,再予以進行向量繪圖。(source:AISAN TECHNOLOGY) |
|
日本與美國皆同步進行動態地圖中的資料蒐繪
目前這方面的系統資料,在日本當地已經開始準備,透過搭配移動測繪系統的車輛,目前已經針對高速公路以及汽車專用道路,進行3維地圖資料的蒐集,預計在2018年度,完成3萬公里的地圖資料。
在完成高速公路以及汽車專用道路的地圖資料繪製後,接下來就會開始進行一般道路的資料測繪工作。不過,由於一般道路的問題相當多且複雜,目前尚未決定如何進行。
除了積極的進行地貌與道路的繪製,另一方面,愛知縣額田郡幸田町也在2017年年底嘗試導入這一套動態地圖系統,結合原有的自動駕駛系統在每條道路的交會點以及新社區中進行實驗。透過這套動態地圖系統,不僅僅為自動駕駛預做準備,同時也將功能性延伸到防災以及道路建設的管理,進而達到讓交通管控無人化的程度。這樣的實驗與研發不只是在日本,在美國的加利福尼亞州也同樣的在進行動態地圖資料的預做工作,一樣是利用移動測繪系統,來進行地貌地物的描繪,預計第一階段將完成數十萬公里道路的資料處理。