造成交通事故的原因很多,主要與交通參與者的素質、車輛機械性能以及道路設施條件有關,有鑑於日常交通道路事故的頻發,以致每年車禍傷亡人數不計其數,其中常遇的事出因由,往往歸咎於人們行駛交通工具時的疏忽大意,尤以大型貨運車等車體較為龐大的運輸工具,而導致意外性的罹難事故不斷重演,因此設計於大貨車行運時所配置的盲區偵測系統,並針對車身各個角度所衍生的死角,能讓駕駛的司機即時反應於貨車始行道路、路角轉彎同時,避免無法直接視察之車身旁側,大幅提升 載運交通的安全性。
及時瞭解和掌握車況,於安全行車是建立在車況良好的基礎上的。為此,車主要及時瞭解和掌握車況,防範的措施上就能避免意外的發生,本執行計畫著重於車輛行駛盲區偵測系統,及結合自製的HUD抬頭顯示器,做為己身之駕駛大型貨運車,周遭車況及間距警示,整合而成全方位的車況安全行進技術。
主要目的為測試大型貨運車無可預警的視角,並且涵括於載運貨物的連結車身,以超波雷達感測在穩定的範圍內探測接近人、事、物,並將感測反應透過HUD(抬頭顯示器)的方式,立時顯示於車前玻璃螢幕屏面,對於貨車本身的行駛路程中,能有效的相對避免駕駛者的疏忽,更能降低過路行人者和機慢車騎士的碰撞安全性。
創作動機
現代社會的生活當中,汽機車為人們不可或缺的代步工具,科技的進步給予了人們許多便利的生活關係,然而這看似造就人們日常的互動之利,另一面同時也間接發生了無可挽回的悲劇,時常在新聞播報中隨處可見的因由車禍 所影響的傷亡。
根據中華民國交通部統計,交通事故主要原因第一首位為「駕駛不當」、其次為「未保持行 車安全間距」,進而使得肇事的情形,難以避遇 危害,數度的緣由不外乎是人為駕駛粗略 所導致形成的。
「車」不論是大型貨車或常見轎車甚至是機慢車等,即便自己本身能夠以謹慎的心態行駛 交通工具,卻難預知外來車輛的來往,皆容易 面臨危險突發狀況,雖如騎機車的人和開車的人,都會配戴安全帽及繫上安全帶和安全氣 囊保護,這些防護措施倒也不能徹底的完全泯 除事故的根源。
在行駛交通工具的過程,以及有效的防護措施,僅是基本上的人身簡易配備,若是遭受到相當 嚴重的撞擊、輾壓,亦是等同於毫無作用,車 禍防患於未然的方式,主要掌握者是駕駛員能 否注意周遭的情況,一旦任何可能導致車禍發生的跡象,都需要密切注意,即以大型貨運車 比起一般車的條件更是容易,因此研發此 創作架構,為進一步預防車禍險象發生的目的!
工作原理
工作原理及功能
為此特針對於大貨車行駛的交通安全性,分別對此類車的整體架構性質,各以其不同於一般普通車與機慢車司機的視覺角,車頭與連結 車身的高度差影響關係。
為解決駕馭者行駛的隱憂,同道行駛機慢車和過路行人的安全虞慮,本研究著手於車體結構的缺要,改善大貨車易於行駛路途中,無法立即察覺旁車、路人的間距性,設計盲區偵測系統,若車身有旁人、物過於接近,便可將超音波雷達其感測人、物的方向面與距離的數據傳輸到車上設置的 HUD。
同時基於開車時能以視覺的直接面,將配置於貨運車上的HUD,隨即將接受到的資料顯示於玻璃前視螢幕,使得司機在開車過程中,不必另外憂慮於無法直視之其俯角面而導致事故。
主要核心功能
在於不同以往的車輛配備中,行車影像環視系統以影像技術辨識於車前、後方和側面所搭載的鏡頭,取得影像方式顯示某程度範圍內的車況,準確率及穩定性也相對的高。
不過,擁有如同優勢的另一方面,也挾帶著一項先天的技 術障礙,就是要克服氣候因素的影響,若是遭遇雨天或濃霧等視線較難以清晰展現時,僅靠被動的鏡頭察看,則該系統就失去了準確的判斷能力。其系統本身將影像為顯示全方位廣角,小型螢幕機的設置也礙於車內駕駛操作面,及本計畫實施研擬方式為以超音波感測行人、物體整合全系統架構的方向面與距離判斷,使用控制晶片HT66F70A 8-bit MCU為處理接受和傳遞訊息,於超音波感測器的偵測、量距及即時性傳輸數據。
與HUD抬頭顯示器整合研究的「同步執行」設計形式。所完成的高安全性盲區偵測系統,將車旁的設置限定範圍內,延伸可視的角度與其它車輛所處的狀況,其距離和位置等,以比擬 HUD的形式,顯示至車駕駛面前的擋風玻璃,使得駕駛員可直接察看。
作品結構
硬體系統流程
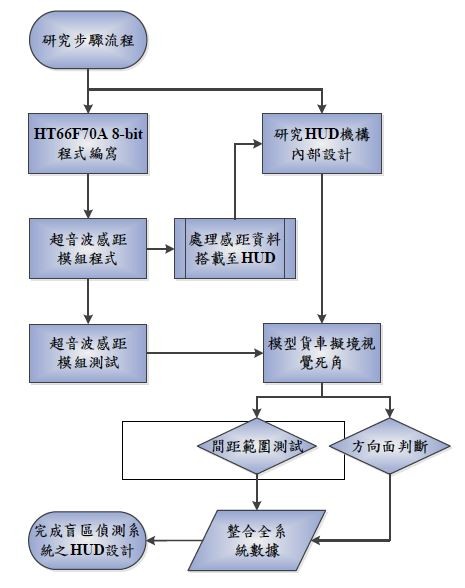
研究步驟流程圖如圖一所示,如前所述,演擬完成的大型貨運車行駛配置盲區偵測結合 HUD系統的應用研究,此系統將包括超音波測距儀的設計,和配置及抬頭顯示器介面的 設計等二個部分,因為 HT66F70A 8-bit嵌入式發展板具有完整的周邊元件、程式函數庫、範例程式,因此可以加速本研究的開發,因此本系統的控制器將採用HT66F70A 8-bit嵌入式發展平台。
整合全系統之架構
超音波感測器隨著用途和元件的差異有不同的驅使性質,大致上用來偵測物體的運動速度、短距離的量測、以及判斷物體有無等, 是屬於一種非接觸型的感測元件,超音波感測 器可區分為發射和接收器,兩者皆同樣具有「壓 電效應」。
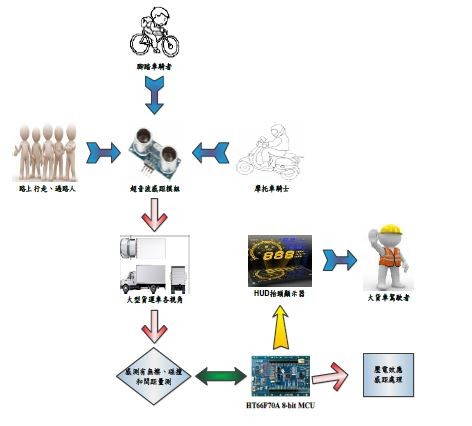
對超音波發射器而言,主要是將電氣訊號轉換成壓力的訊號去壓縮周圍空氣;而這些受壓縮的空氣將會壓縮接收器上的壓電超音波測障系統材料,並產生「壓電效應」,進而將壓力訊號轉換成電的訊號,至此以圖二表達本系統 架構的展現示意圖。
程式設計之規劃
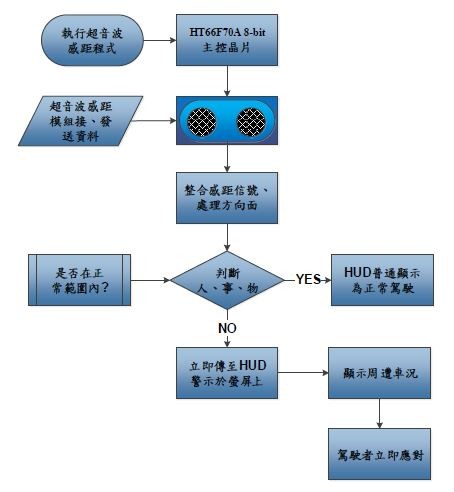
整合全系統的控制流程如圖三所示,屏除原先能直接簡潔的顯示之外,其HUD基本含有的出行駛時間、水溫、時速、轉速、超速警示、 油耗和電壓等功能,同時在置於HUD此一配備中,設計超音波測距模組的連結,把大型貨運車偵測車頭前與車身側旁的行人、騎士等事物,感測所在方向及間距數值結合 HUD抬頭直接顯示至螢幕,是為新穎的晉升安全偵測系統方式。
測試方法
擬境分析
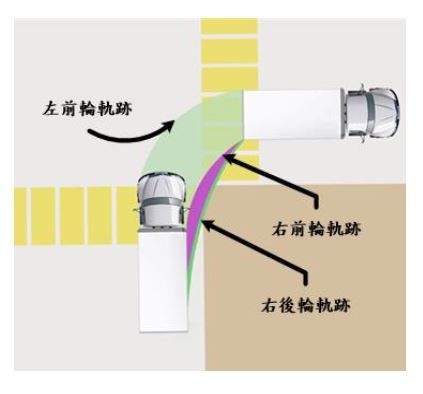
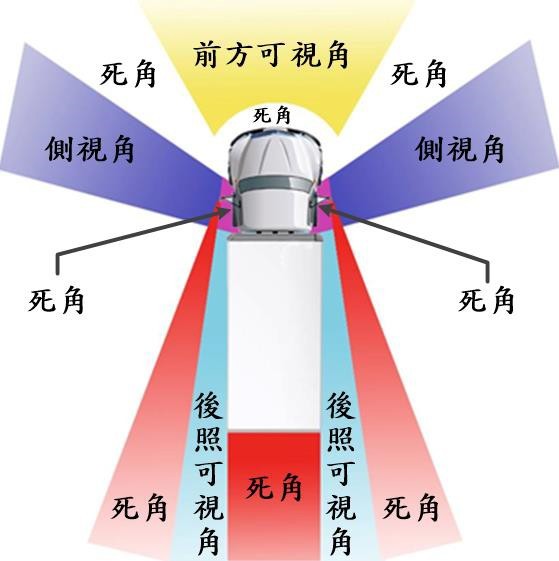
因大型貨車般之車體較為龐大的車型,如同圖四的大貨車之內輪差軌跡示意圖,在車頭的部分甚高於小客車、機慢車及行人等,和駕駛位左右側的車體框架關係,就成為了死角區,在後連結貨物車部分,除側邊後視鏡之反照可視角以外,幾乎為死角區。
此外,絕大多數車子的前後輪行進軌跡不同,前輪可隨方向盤左右轉動,後輪則固定不變,只能往前滾動。直線行進時,前後輪都往同個方向滾動;一旦轉彎了,前輪所走的路徑,就和後輪不一樣,而後輪行進時所多出來的範 圍,就此產生內輪差。
行駛環境的條件
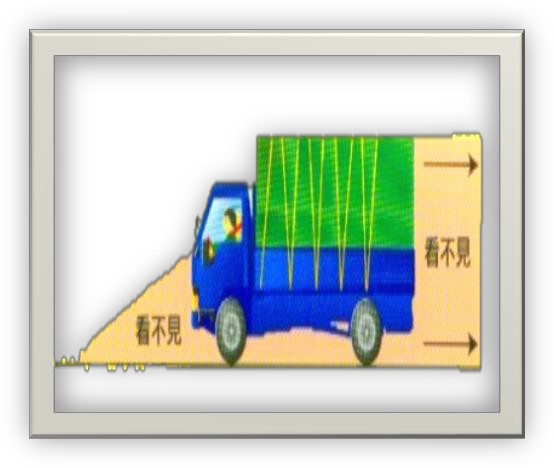
比擬圖五的側面之大貨車可視角示意圖,在正常靜止狀態下,人的雙眼視野可達210度,但兩邊的70度是看不見的,即「天生的視野死角」,真正能夠看清楚的只有中間的70度。大型車(如工程車、砂石車、大型公車等)視野死 角眾多,若是過於靠近或跟隨於側旁是相當危 險的情形,易因內輪差關係而發生事故,甚至 小客車也是不可輕易忽視的。
測試結果說明
一般而言,愈是大型的車子,內輪差比也就愈大,加上駕駛者透過車內後視鏡及車窗外的左右兩側後視鏡往後看,就會有視覺盲點存在,而那個視覺盲點通常又和內輪差相互重疊。因此,當大貨車等大型車子於切換車道或道路轉彎時,在側後方的內輪差範圍內剛好又有行人、機慢車或其他車子,就很有可能出現 擦撞的意外事故。
因此於搭設超音波感距模組,除必須於如圖六的死角處配置作為感應,更應當考量過 彎形成的內輪差區域點設置,如此當過彎時側 旁有小客車、機慢車及行人等,進入內輪差一 定程度上的警示領域之下,便可立即使 HUD 顯 示通知貨車司機以做出相對應的避險。
現在汽車安全的概念,已經從被動減少碰撞造成傷亡的範疇,演進到主動避免車輛碰撞 事故發生機會的階段,另一方面,超音波雷達的優點在於對雨、雪、霧的穿透能力強,衰減小,而且測距原理簡單、製作方便、成本低,也 因此運用都普勒原理的超音波雷達,偵測距離小於4公尺,角度範圍可達 60 度。
(作者潘善政1、梁文源2、胡博景3、吳政南4、陳長佑5為樹德科技大學電腦與通訊系1教授及2-5學生)
參考文獻
[1] 中華民國交通部事故分析: http://www.freeway.gov.tw/Publish.aspx?cnid=51 6&p=128
[2] 超音波居離感測器之專利分析: http://ntur.lib.ntu.edu.tw/bitstream/246246/85214/ 1/5.pdf
[3] 超音波之控制原理: http://eshare.stust.edu.tw/EshareFile/2010_4/2010_4_f89b9bdf.pdf
[4] HUD–抬頭顯示器: http://zh.wikipedia.org/wiki/%E6%8A%AC%E9%A0%AD%E9%A1%AF%E7%A4%BA%E5%9 9%A8
[5] 盲點偵測系統專題研討: http://blog.xuite.net/gm9013355/blog/51633688-B SW%3FBLIS%3F%E7%9B%B2%E9%BB%9E% E5%81%B5%E6%B8%AC%E7%B3%BB%E7% B5%B1%E5%B0%88%E9%A1%8C%E5%A0% B1%E5%91%8A