目前市面上的望遠鏡大部分都是以手控器為主,使用按鍵選擇模式的方式來控制望遠鏡。複雜的按鍵模式,對初學者來說,還是無法輕易上手,如何讓望遠鏡的操作更為簡單、容易,因此想出類似雷射筆功能的指星裝置。因此,指星裝置的設計目的就是為了簡化手控器的功能,指星裝置透過有線的方式,接至望遠鏡雲台上,藉此達到傳輸命令與控制望遠鏡雲台的方式。
而指星裝置內部有加速度感測器、電子羅盤、陀螺儀和藍牙等模組。當想觀看天體時,只需要按下按鈕,並將雷射對準該星星,再藉由感測器來抓取仰角和方向角。此時,指星裝置會將角度的值傳至望遠鏡,便可將望遠鏡移至該星。此外,透過指星裝置內部的藍牙模組與行動裝置做配對連線,當指星裝置將角度的數值傳至望遠鏡時,同時也會傳至行動裝置的APP應用程式中,並即時顯示出該星的資訊。透過此作品,讓觀星不再是困難的事,且對剛入門的初學者來說,更是方便了許多。
前言
對於剛踏入天文界的初學者,想要更進一步的了解天文脈絡,但是看書太枯燥乏味,並且市面上的天文儀器操作上太過於複雜,若能將複雜的操作簡化,並且能得到豐富的天文知識,在教育上便是一大進步。
近年來智慧型手機發達,天文的APP也跟著陸續增加。因此透過感測器與無線模組的方式,將訊息傳至手機APP,讓我們更方便更簡單的來觀測及了解天文,並來達到有教育性質並且具高互動性。
系統特色
現今市售的天文望遠鏡的手控器以多組按鍵和LCD作為使用者介面,但複雜的按鍵組合,讓使用者在操作上較為不易。而曾經看到老師帶學生在講解天文時,手上拿著綠光雷射筆再指著星星做講解。因此以雷射筆為發想並簡化手控器的功能,使望遠鏡操作起來也更為簡單、容易,並且可以透過APP來讓使用者了解該星星的資訊。而在星星的資訊上,可給予故事和歷史由來做解說。
實用性
我們開發的指星裝置控制系統除了有一般的雷射的功能之外,在實用性的方面可以用在互動教學方面。藉由此裝置搭配APP系統,可以讓天文的初學者能夠輕鬆的瞭解天體,並且指星裝置還可以透過UART傳送轉動數據給天文望遠鏡的托架直接做實體觀測, 兼具互動教學又不失樂趣的裝置。
創新性
此指星裝置不單單只有雷射的功能,多增加了藍牙傳輸搭配APP來達 到即時瞭解目前指星裝置雷射所指到星體的資訊。此外,藉由UART傳輸可以控制天文望遠鏡的托架轉動至指星裝置的雷射光所指的方位及傾角來作即時觀測。
工作原理
MCU核心功能
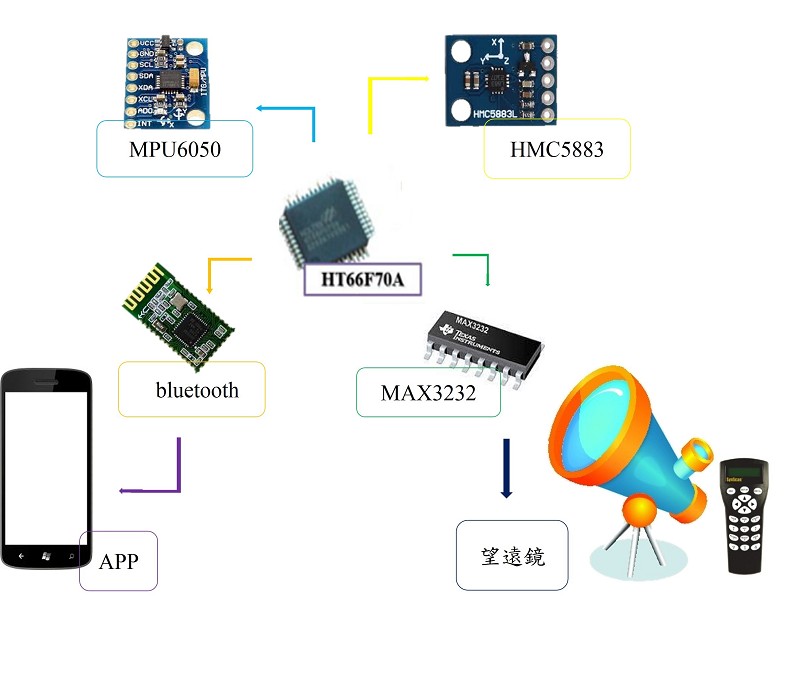
本作品使用一顆盛群半導體公司所推出的HT66F70A 控制器作為指星裝置的控制系統的核心。其中,使用三組GPIO模擬的UART,第一組UART介面傳輸感測器所計算的角度至望遠鏡雲台,第二組UART介面透過藍牙模組使指星裝置控制系統可與APP進行資料傳輸,而另三組UART介面接收感測器的值。
而望遠鏡利用指星裝置控制系統所計算出的角度來移動方向與仰角,便可觀看指星裝置控制系統所指向的星星位置與角度。
綠光模組
在此,指星裝置中需具備一個可承受?大電流的MOSFET開關電路SW,並用於將3V~5V/500mA的電源輸出連接到綠光模組。如圖2-1所示,為綠光模組示意圖。
感測器模組
感測器採用InvenSense公司所推出的MPU6050和Atmel公司所推出的HMC5883元件,內部包含3軸電子羅盤與3軸加速度感測器與3軸陀螺儀。整體擺放位置是與綠光模組指向方向成一直線,主要可以抓取到方向角和俯仰角,再傳送至後端的應用裝置。
多段式按鈕控制
若開關未按下時,則關閉上述之MOSFET開關電路SW;若開關位置按下第一段時,則接通上述之MOSFET開關電路SW;若開關按下第二段時,指星裝置會將方向角及俯仰角傳至應用端,同時關閉上述之MOSFET開關電路SW。
有線/無線傳輸
指星裝置可由有線和無線的方式做資料傳輸,透過RJ12是以有線的方式與望遠鏡雲台做連線與傳輸,而無線則是與手持裝置做連線與傳輸。
其中,無線模組採用BC04B藍牙模組,此藍牙模組為2.1版本,支援UART、SPI等介面,最多可與7個藍牙模組做連線。而本系統將指星裝置設為從端點,讓行動裝置可以與指星裝置做連線,並達到更多的應用目的。
控制命令通訊格式
當行動裝置要與指星裝置做連線時,行動裝置會傳送“CM01#”,相對的,指星裝置收到後,會回傳“#”,如此即完成連線。而當指星裝置按下第二段按鈕時,指星裝置會傳送俯仰角和方向角到行動裝置,其格式為“Cxxxx,yyyy#”。當裝置收到後,則會回傳“#”。其中,xxxx(或yyyy)為4位ASCII碼,且並不直接代表角度,需透過加密公式才可得到正確之角度。
APP應用程式
APP應用程式是由網路上所提供之星庫資料來建置的,並建出第一視角所看到的天體。當按下連線後,即會與指星裝置做連線,當指星裝置指向天體任一顆星星,即會顯示出該星的資訊。
作品結構
硬體部分
如圖3-1所示,為指星裝置控制系統架構圖。其中,主控制器是採用盛群半導體公司所推出的HT66F70A控制器,用來控制感測器、藍牙和雷射模組的輸出入。而兩段式按鈕第一段按下去,則驅動主控器IO腳,開啟綠光模組;第二段按下去,則將感測器角度透過RJ12或藍牙傳至應用端。
而供電方式可由內部3.7V充電式鋰電池供電,並可以透過USB及充電電路為電池充電。
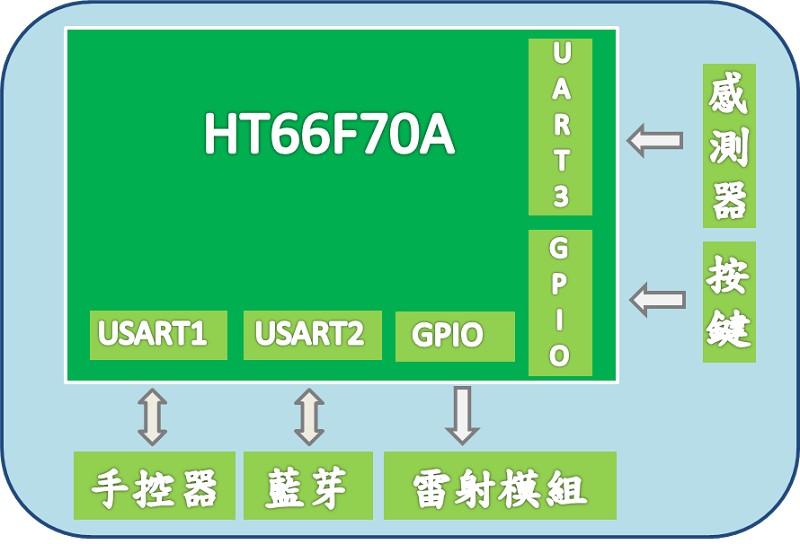
如圖3-2所示,為指星裝置控制系統硬體方塊圖。其中,透過I2C、GPIO和兩組UART介面與感測器、手控器、兩段式按鈕和藍牙溝通。本裝置使用I2C介面讀取感測器的值,並進行角度的計算。此外,運用一組UART與手控器溝通,另一組UART則控制藍牙,分別與望遠鏡托台與APP進行資料傳輸。最後,再以按鍵驅動GPIO接腳,第一段為雷射模組開關,第二段為GOTO鍵,傳輸訊息使望遠鏡移動。
軟體部分
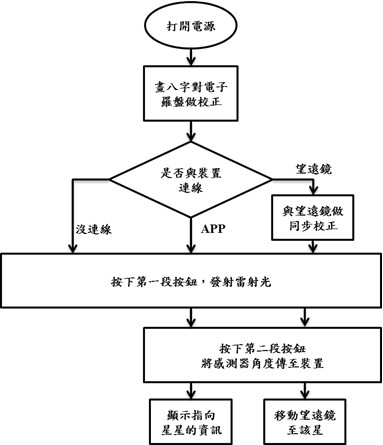
如圖3-3所示,為指星裝置控制系統之系統流程。指星裝置上電後須做電子羅盤的偏移量校正,我們運用在空中畫八字來記錄偏移的中心點。而無論是否與任何行動裝置做連線,按下第一段按鈕都會觸發雷射光。
若要與望遠鏡連線,需要先與望遠鏡做同步校正,再來按下第二段按鈕時,則會傳送感測器角度至行動裝置。緊接著,將望遠鏡會移至該星位置;若是與APP應用程式連線,則APP應用程式會顯示該星的資訊,並且行動裝置與指星裝置可以同時進行動作。
測試方法
測試UART傳輸格式
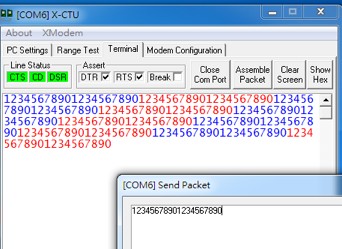
如圖4-1所示,為GPIO模擬UART介面後,使用XCTU來觀看模擬的UART介面,傳收值測試是否準確,作為指星裝置與手控器、感測器和藍牙之間的溝通橋樑。
感測器分析結果
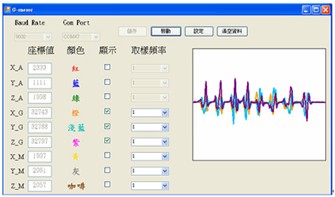
為了確認所讀取的資料是否正確,需先將感測器接至開發平台,並再透過藍牙傳至PC做分析。而感測器資料由C#應用程式撰寫來收集,並進而比對角度誤差結果。
如圖4-2所示,為感測器C#分析介面。其中,先將感測器資料透過藍牙接收後,以圖形化介面顯示,並將資料存至文件檔中。
應用程式
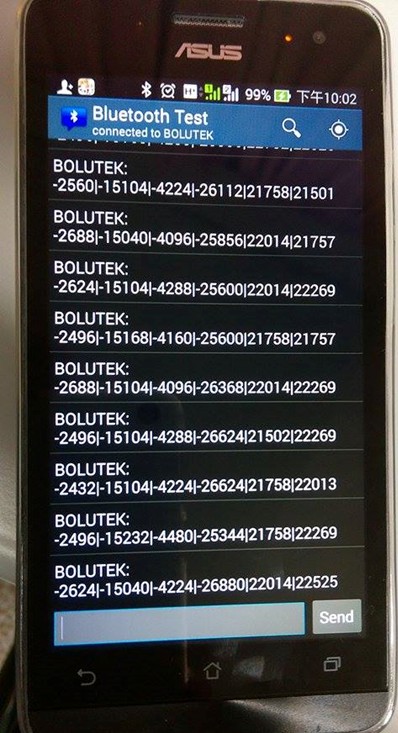
如圖4-3所示,為手持裝置上的Android APP接收藍牙值畫面。在這APP應用程式中,具備接收並顯示藍牙訊息,並與MCU所連接的藍牙模組連線以測試出APP應用程式所接收到的值是否與HT66F70A控制器所傳送的值相同。
應用程式
而另一個應用程式也是以Android APP來實現與設計,並將星座繪製於顯示器上,如圖4-4所示。
如圖4-5所示,當進入APP後,可以自由滑動觀看星體資訊。如要與指星裝置做連線,則按下右下角望遠鏡圖案,再按下connect,即可選擇與指星裝置做連線。
而與指星裝置做連線後,即可透過指星裝置來指向想觀看的星星,其APP即會顯示出該顆星的資訊。如圖4-6所示,若使用者指向月亮,並按下第二段按鈕,即會顯示出月亮的資訊,爾後可以加入一些故事,來提升教育性。
結論
望遠鏡雲台自動初始化後,便會指向北極星的位置,並將望遠鏡調至水平位置,連接上指星裝置,與指星裝置進行連接與校正動作後,便可開始使用指星裝置指向想觀看的星體。
此外,簡化了繁雜的操作步驟,對剛入門的人來說,能夠輕鬆的使用望遠鏡觀看星體,不用因為不懂望遠鏡調整與校正和手控器複雜的設定,而對觀星感到怯步。
而搭配APP應用程式的互動,讓使用者能夠了解到所觀看的星體資訊與一些故事,增加了更多的互動性質與教育性質。
(本文作者許永和1、邱敬育2、蘇孝駿2為 國立虎尾科技大學資訊工程系1教授、2學生)
參考文獻
1.加速度感測器與電子羅盤原理
http://www.seraphim.com.tw/upfiles/c_supports01328152963.pdf