藉由市場追求更高效能和功率密度電源供應器及提高交換頻率的需求,從而促進數位控制器能因應市場趨勢的變化。專為電源供應器應用的Microchip dsPIC33EP ‘GS’系列數位訊號控制器是一項主要範例。這些裝置已經引進可縮短線性差分方程式(LDE)的執行時間和降低整體系統延遲的全新功能。這些功能有助於提升控制迴路的取樣率並緩解相位誤差,進而可提升迴路增益效能。
在數位電源供應器單元(PSU)中,有數個因素會影響微控制器專屬的迴路增益效能。這些因素包含最大取樣率、執行補償器演算法所需時間、類比至數位轉換器(ADC)的取樣/轉換時間和微控制器作業速度。對於峰值電流模式控制轉換器,比較器速度和控制數位到類比控制器(DAC)的準確度/速度也會對PSU迴路增益效能造成影響。選取特定應用的微控制器時,必須考量這些所有項目。讓我們看看Microchip的dsPIC33EP ‘GS’裝置如何協助新一代的電源供應器提升迴路增益效能。
提升作業頻率
新型dsPIC33EP裝置最引人注意的功能是可提升作業頻率。新型dsPIC33EP裝置的作業頻率已提升至70 MHz,對現有的dsPIC33FJ裝置而言,最高可提升每秒3000萬條指令(MIPS)。如果我們使用以250 kHz速率執行60條指令的控制迴路,則這會消耗總計為15 MIPS或是dsPIC33FJ裝置上可用資源的37%。
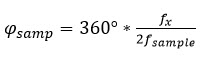
以相同的取樣頻率執行時,此相同的控制迴路程式碼只會消耗新型dsPIC33EP處理器上可用CPU資源的20%。如果移轉至新型dsPIC33EP裝置後消耗相同百份比的MIPS,則能夠讓控制迴路以350 kHz的速率執行。進一步分析顯示相位誤差在指定的交越頻率處降低29%。請參閱圖1以計算交越頻率處因為取樣所致的相位誤差。
在大多數使用數位補償器的PSU中,功率級的控制通常是由簡單的LDE所管理。雖然LDE方法為人所知且普遍使用,但數位實施有益於實施非線性控制演算法。然而,非線性技術不屬於本文的討論範圍。
LDE的大小取決於用於將持續頻率功能轉換為離散頻率功能(向前/向後Euler、雙線性轉換等)的補償器順序和方法。簡而言之,LDE是使用控制誤差與先前控制輸出之線性組合而產生電流控制輸出的數學演算式。請參閱圖2以查看3P3Z線性差異方程式的範例。
可以看見對於3P3Z補償器而言,必須執行七次乘法和加法,才能決定所需的控制輸出。這類型的算式非常適合dsPIC33裝置的結構。可以使用乘法累積(MAC)在七個單一週期指示中處理這些指示。但仍然會有其他軟體額外負荷,包含:對工作暫存器入棧/出棧、從工作暫存器載入/取出資料、重設陣列,以及鉗位/換算控制輸出。這項額外負荷可能影響控制迴路執行率,因而導致相位邊限減少。
備用工作暫存器
如之前內容所示,增加了MIPS之後,控制迴路的執行時間稍微減少了一點點。但是,這可能因為新型dsPIC33EP ‘GS’裝置和新增的備用工作暫存器而有更顯著的進展。這些裝置可整合額外兩組15個工作暫存器,而且可持續保留。這代表可在裝置初始化階段,將鉗位限制、換算因數、係數指針等資料預先載入至適當的備用工作暫存器中。
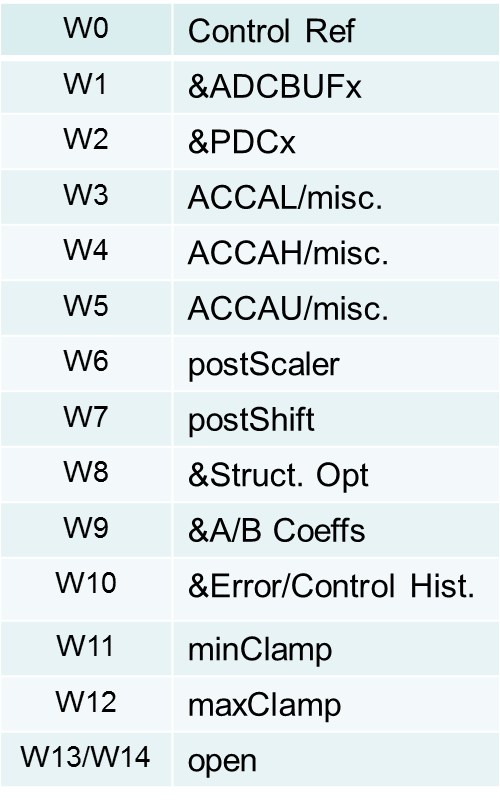
這些暫存器組可與特定中斷優先等級產生關聯,而此等級只有控制迴路軟體能夠存取。之後,這可消弭在堆疊上對工作暫存器入棧/出棧,而且減少執行補償器演算法時將資料導入工作暫存器時的額外負荷。圖3是如何使用Microchip的硬體加速補償器功能而成功利用備用工作暫存器組的範例。重要的是記住特定指令(需要對資料存儲位置施加限制)需要特定暫存器。
讓我們考量備用工作暫存器對於高頻率控制迴路之MIPS耗用量的影響。dsPIC33FJ裝置上的補償器演算法之前每隔一個交換週期呼叫一次,而現在每個交換週期呼叫一次且仍然利用相同百分比的MIPS。
圖1中呈現因為取樣程序所致的相位誤差。相位衰退的數量取決於交越頻率和取樣頻率。因此,如果取樣率翻倍成長,相位衰退就會減少為一半。這代表使用備用工作暫存器時,相位誤差會因為裝置運作速度降低50%而減少29%。
若要舉例說明因為取樣頻率所致的相位誤差減少現象,請考慮使用取樣頻率為175 kHz且頻寬為10 kHz的系統,如此相位誤差會以大約10度左右計算。取樣頻率為350 kHz的相同系統只會有5度的相位誤差。與dsPIC33FJ裝置相較之下,可在利用相同百分比的MIPS的同時透過dsPIC33EP裝置達到此額外相位邊限。
範例顯示可使用備用工作暫存器和提升dsPIC33EP裝置的運作速度來提升取樣頻率,從而降低相位誤差。接下來,我們會討論可提升相位邊限的其他裝置特定周邊設備和技術,從而提升迴路增益效能。
dsPIC33EP ‘GS’裝置系列包含新型12位元ADC,其可整合多個逐次求近暫存器(SAR)核心。裝置可同時取樣多個類比輸出,而且可在少於300 ns的情況下擁有專屬的12位元結果。專屬的SAR核心會持續追蹤輸入訊號,這代表不需要任何取樣時間。ADC看見觸發事件時,便會自動啟動轉換程序。請記住,雖然取樣/轉換時間看似會造成控制迴路的延遲,但可最大程度地降低整體取樣/轉換延時,因此有益於相位邊限誤差。
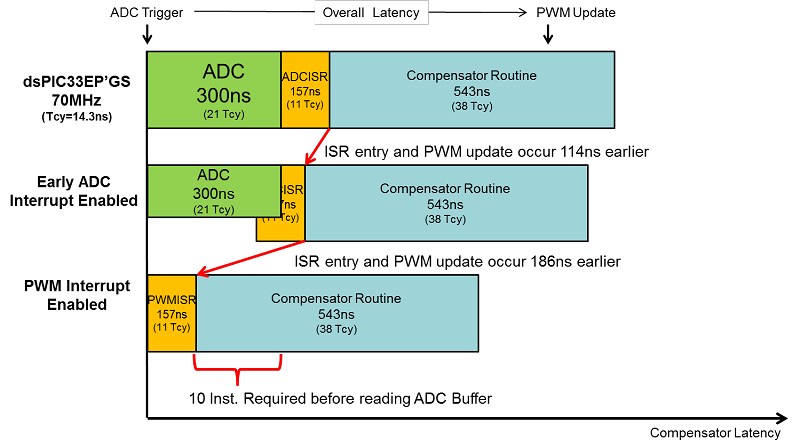
關於ADC的一個特殊功能是可在轉換完成之前產生中斷。使能時,此ADV提早中斷功能有助於降低從ADC完成轉換到啟動控制迴路軟體(中斷)期間的中斷延時。最大可選取提早中斷時間是8個ADC時鐘(Tad)。以最快速的傳輸量進行時,這可將進入補償器演算法的時間減少114 ns。這是降低控制迴路軟體中總延時的另一個方法。請參閱圖4以瞭解ADC提早中斷的詳細資料。
另一個ADC模組功能是納入多個數位補償器,這些補償器可設定為在轉換類比結果處於指定限制組範圍外(或範圍內)時提供中斷。這可能看起來不像會直接影響取樣頻率,但確實是絕對會造成影響的功能。從CPU卸載軟體且只在錯誤情況下執行時,則會使用數量較少的MIPS。這代表我們可以提升控制迴路的取樣率。這具有高度軟體依存性,而且並非所有應用都能利用這項新功能。但若是提到輸入電壓及溫度監控等範例,其可降低CPU工作負荷。
若要減少從ADC觸發到控制輸出寫入事件甚至更早之前的時間,則可使用PWM ISR,而非ADC中斷服務常式(ISR)及ADC提早中斷功能。在一般使用個案中,PWM會觸發ADC以啟動轉換,但現在其也會同時產生自己的中斷事件。將補償器演算法放置在PWM ISR內部時,軟體會先開始執行補償器演算法,然後才取得ADC可提供的電流反饋資料。在軟體執行和ADC轉換完成之間,大約有143 ns。
這代表微控制器以最大裝置頻率運作時,需要至少先放置10個指令,然後再讀取ADC結果緩衝區。如果補償器演算法是以可使用此技術的方式建構而成,則可將進入補償器常式的時間減少45%。請參閱圖4以取得關於PWM中斷服務常式的提早中斷時序範例。請注意,此方法僅適用於專屬SAR核心的可預測時序。
補償器演算法結構
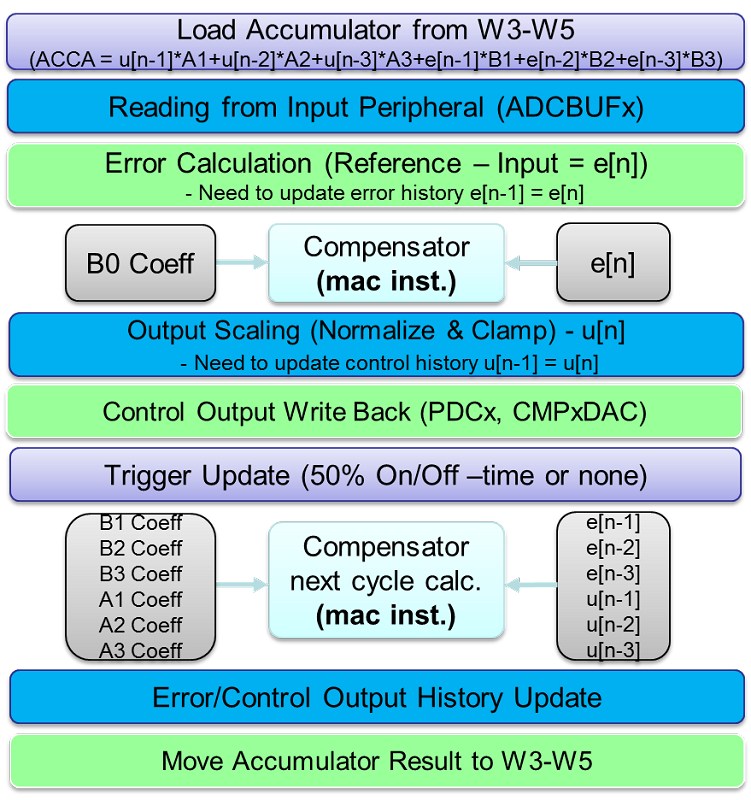
補償器演算法的結構對於更新控制輸出變數所耗費的時間至為關鍵。有了備用工作暫存器,就能以下列方式撰寫演算法:在更新控制輸出之前,只需要將電流誤差乘以係數B0,然後將結果加到來自先前週期的累積輸出。當然,仍然會有回溯正規化及鉗位,但這可大幅降低控制輸出寫回時間,而不需要專屬累積器。圖5顯示如何排列補償器演算法以實現最快速更新時間的範例。在輸入補償器演算法時,控制輸出寫回時間現在可在少於300 ns的時間內發生。這對於下列章節的實用性也越趨明朗。
現在讓我們考量相位誤差時這些所有不同的功能。在電壓模式控制及平均電流模式控制系統中,能以50%的關閉時間取樣輸出電容器電壓或電感器電流。最常見的方法是在50%開啟時間時取樣,可先提供足夠時間來處理控制演算法,然後再開始下一個PWM週期。
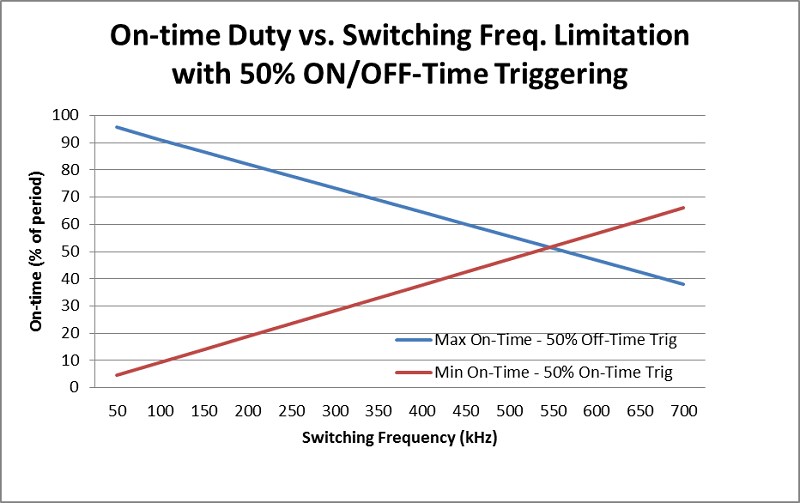
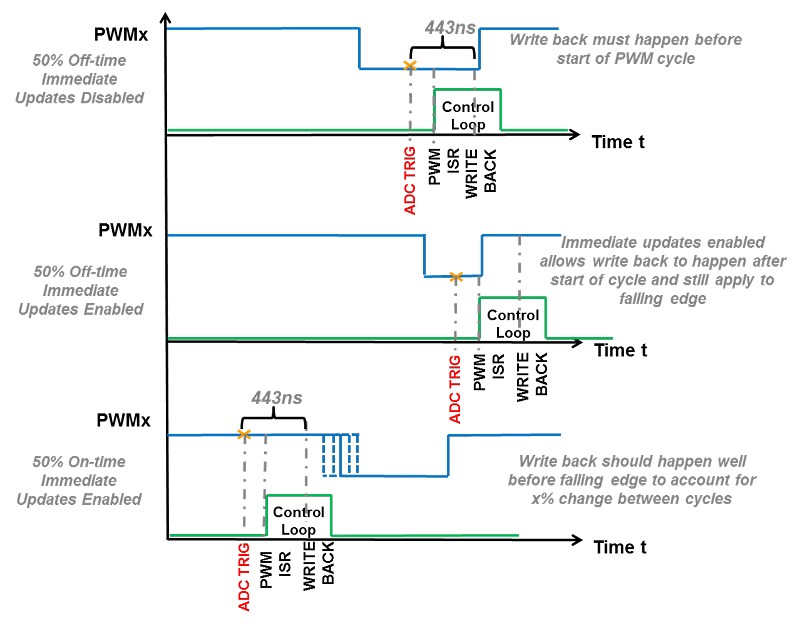
對於上述提及的所有功能,可以輕鬆地在關閉時間取樣控制反饋訊號並寫回控制輸出,然後再開始下一個PWM週期。圖6顯示跨交換頻率之範例實施的估計工作週期限制,而圖7則舉例說明50%關閉時間的時序圖。相位邊限的增加取決於工作週期,但如果平均為50%工作週期,則與50%開啟時間測量相較之下,相位誤差會減少一半。
dsPIC33EP ‘GS’裝置具有立即更新模式,在使能時可在電流週期中更新PWM參數(也寫入特殊功能暫存器(SFR)時)。這適用於解析度均為1 ns的相位、週期、死區和工作週期。在50%關閉時間案例中,曾提及控制輸出的寫回必須發生在下一個PWM週期開始之前,而且這會限制特定交換頻率適用的最大開啟時間值。使能立即更新時,則不屬於此情形。此功能現在允許工作週期限制及/或交換頻率限制進一步增加,如此有助於再次降低相位邊限誤差。圖7舉例說明兩個50%關閉時間實施情況的時序。
降低相位邊限誤差的最佳個案是在50%開啟時間時取樣控制反饋訊號,同時確保新的控制輸出已套用至目前PWM週期的後沿。這是指正根據補償器輸出來更新PWM工作週期的作用邊緣,且此補償器是剛剛在相同PWM週期中呼叫過。這可提供數位系統中可能最佳的相位邊限。
請注意,雖然這是最佳使用個案,但因為最短開啟時間的限制,而無法在所有應用中實施。請參閱圖6以取得最短開啟時間,作為跨不同交換頻率之交換期限的百分比。例如,如果以100 kHz提升PFC交換,最短開啟時間需求將稍微少於10%的期限。最小工作週期在交流電源電壓的峰值(額定220V輸入電壓)發生時,工作週期需求大約是22%,因此可預留大量系統餘裕,在控制輸出發生巨大變化時進行立即更新。
當輸入電壓進一步增加時,立即更新便開始看似週期更新即將結束,因而減少相位邊限。但是,這會在正常情況以外的情形發生。圖7也顯示與50%開啟時間觸發配置相較之下,50%開啟時間觸發使用個案的時序圖。
已使用同步降壓轉換器執行範例,其中整合了本文中討論的所有技術。結果顯示取樣率從每隔一個PWM週期(175 kHz)增加為每個PWM週期(350 kHz),而不需要更多MIPS,已撰寫補償器來快速寫回控制輸出變數,已產生PWM中斷來處理控制迴路,而且已使能50%開啟時間搭配即時更新。
觀察到的結果是相位邊限大約增加16度。迴路增益效能已開始呈現邊限穩定的狀態且只有46度的相位邊限,而且結束時非常接近62度的類比相應物。本文所述降低相位誤差之技術雖非一體適用;但適用於廣泛的設計且可增強某種程度的迴路增益效能。
(本文作者Alex Dumais任職於 Microchip Technology)