步進馬達可被看作是無需換向的電動馬達。通常的情況下,馬達中的所有繞組是定子的一部分,轉子是個永磁體,在可變磁阻馬達中,轉子是一些軟磁材料的齒塊。所有換向必須由馬達控制器在外部處理,通常情況下,馬達和控制器經由設計,令馬達可保持在任意固定位置,及向一個方向或另一個方向旋轉。正如我們所知,大多數步進馬達可以音頻頻率步進,令它們能很快旋轉,使用合適的控制器,它們可立即在控制的方向啟停。
步進馬達主要用於定位應用,但它們並不是唯一擁有這項功能的工具。
下方是常見用於定位的馬達所選擇的基本資訊。請注意,可能還有其他的選擇,如AC感應馬達或壓電馬達,但列出的這三大馬達類型代表了當今針對通用運動控制的絕大多數應用。
1.步進馬達—這些馬達是自定位的,因而使用簡單。它們既不需要編碼器來保持位置,也無需伺服控制回路。主要缺點是振動和雜訊,和有限的速度範圍。像無刷直流馬達必須在外部使用多相驅動器「換向」。
2.直流有刷馬達—這些馬達需要一個位置編碼器用於回饋,和使用一個PID(比例、積分和微分)控制器或其他位置回路控制器來穩定。這些馬達無需外部相位調整—提供一些電流就可以了。但是在馬達內部完成換向的機械刷可能最終磨損和失效。
3.無刷直流馬達—這些馬達需要帶有編碼器的伺服控制,用於回饋及外部電子換向。它們無刷但在較大速度範圍提供高轉矩。相較直流有刷馬達,當今的無刷直流馬達因為降低過去更高的成本,提供在伺服控制應用中的「go to」選擇。
對於某些應用,需要在使用伺服馬達和步進馬達之間作選擇。這兩類馬達可能提供相似的精確定位,但它們的方式不同。伺服馬達需要某種類型的類比回饋控制系統。通常情況下,這包括一個電位器來提供關於轉子位置的回饋,和一些混合電路通過馬達來驅動電流,這電流與所需位置和當前位置之間的差異成反比。
在步進馬達和伺服馬達之間作選擇時必須考慮一些問題;選擇哪個將取決於應用。例如,使用步進馬達完成定位的可重複性取決於馬達轉子的幾何形狀,而使用伺服馬達完成定位的可重複性一般取決於電位器和回饋電路中其他類比元件的穩固性。
步進馬達可用於簡單的開環控制系統;用於以低加速度及靜態負載工作的系統一般是足夠的,但對於高加速度,特別是如果涉及可變負載,那麼閉環控制可能必不可少。如果在開環控制系統中的步進馬達是超轉矩,轉子位置的所有資訊都被丟失,那麼系統必須重新初始化;伺服馬達不受這問題影響。
步進馬達類型簡介
步進馬達有兩種,永磁和可變磁阻(還有混合馬達,從控制器的角度,它與永磁馬達沒有區別)。如果馬達上沒有標籤,您可在未提供電源時大致憑感覺辨別這兩者。當您用手指扭轉轉子時,永磁馬達往往「鈍齒」,而可變磁阻馬達幾乎自由旋轉(雖然它們由於轉子頑磁可能輕微鈍齒)。您也可使用歐姆表區分這兩種馬達。可變磁阻馬達通常有3個(有時4個)繞組,及一個返回值,而永磁馬達通常有兩個獨立繞組,帶或不帶中心抽頭。中心抽頭繞組用於單極永磁馬達。
步進馬達有寬範圍的角解析度。粗糙的馬達通常每步轉90度,而高解析度的永磁馬達通常能處理每步1.8度或甚至0.72度。使用適合的控制器,大多數永磁馬達和混合馬達可以半步運轉,並且某些控制器可處理更小的分步或微步。
對於永磁步進馬達和可變磁阻步進馬達,如果只有馬達的一個繞組通電,轉子(在空載下)將捕捉到一個固定的角度,然後保持該角度,直到轉矩超過馬達的轉矩,此時,轉子將轉向,試圖保持在每一連續的平衡點。
–可變磁阻—這種馬達不使用永磁體。因此,轉子可無約束地或無「鉗制」轉矩的移動。這種構造最不常見,一般用於無需高度轉矩的應用,如載物片的定位。
–永磁—也被稱為「canstack」或「tincan」馬達,該設備有個永磁轉子。它是個相對低速、低轉矩的設備,有45度或90度的大步距角。這簡單的構造使這些馬達的製造成本很低,令其適用於低功率應用。
–混合步進—這版本的步進馬達巧妙地結合了可變磁阻和永磁兩種類型。
步進馬達基本原理
步進馬達的功能
– 旋轉角度與輸入脈波數成正比
– 旋轉速度與輸入脈波的頻率成正比
– 開環系統無需位置回饋
– 對加速、減速和步進指令的極佳回應
– 非累積定位誤差(+/-5% 的步距角)
– 卓越的低速和高轉矩功能,無需齒輪減速器
– 在通電時保持轉矩
– 固有的鉗制轉矩
– 雙向運轉
– 可停止而不損壞馬達
– 無刷用於更長的無故障使用時間
– 精密的球軸承(取決於品牌/類型)
步進馬達的缺點
– 如果控制不正確會發生共振
– 在極高速度下不易操作
– 如果超轉矩,位置的所有資訊都被丟失,系統必須重新初始化
– 生產比等效的直流/交流馬達的給定尺寸更小的轉矩
繞組連接
步進馬達有若干不同的引線配置。最受歡迎的是:
4引線 - 雙極
5引線 - 單極
6引線 - 單極, 雙極(串聯)
8引線 - 單極, 雙極(串聯)和雙極(並聯)
步進模式
步進馬達可以多種不同序列被驅動。最常見的是:
波驅動
在這種模式下,在任意給定時間只有一個相位被激勵。這意味著對於單極馬達只有25%的可用繞組被利用,對於雙極馬達只有50%的可用繞組被利用。
整步驅動
在這種模式下,在任意給定時間兩個相位都被激勵。這意味著對於單極馬達有50%的可用繞組被利用,對於雙極馬達有100%的可用繞組被利用。
半步驅動
在這種模式下,波驅動和整步驅動序列交替進行,使轉子能在半步內對齊。這意味著對於單極馬達平均有37.5%的可用繞組被利用,對於雙極馬達平均有75%的可用繞組被利用。
應用
*工業機器—步進馬達用於汽車儀表和機床自動化生產設備。機器人製造、檢驗和製程。
*安全監控—安全監控業界的新監控產品,包括監控攝影機PAN/ZOOM/TILT
*醫療—步進馬達用於醫用掃描器、採樣器,還有在數位口腔攝影中見到的液壓泵、呼吸機和血液分析儀。
*消費電子—步進馬達在攝影機中提供自動數碼相機對焦和變焦功能。
除了上述的應用,還有商用機器應用、電腦周邊應用。
步進馬達驅動器方案
隨著更加注重安全監控、醫療和工業應用,及降低系統級設計和組裝成本,所有製造商都轉向更高的整合水準及降低總體成本。數位世界中的高度整合並不是新鮮事,每18個月就會翻倍,積體電路的尺寸縮小近50%。在馬達通常處於的電源類比世界中,似乎不是那麼簡單。需要考慮馬力、在馬達驅動過程中的散熱和雜散電流,驅動器必須是高效能的、小型的和易於整合到一個類比馬達世界裏。
重視成本、精度和易用性的世界已轉至步進馬達應用。如前幾段所述,步進馬達理論上是一大簡化的奇跡。它無刷或接觸。基本上它是個同步馬達,使用電子磁場切換至旋轉電樞磁體。它將數位脈波轉換為機械軸旋轉,換言之它是個「數位馬達」。
控制步進馬達中的電流
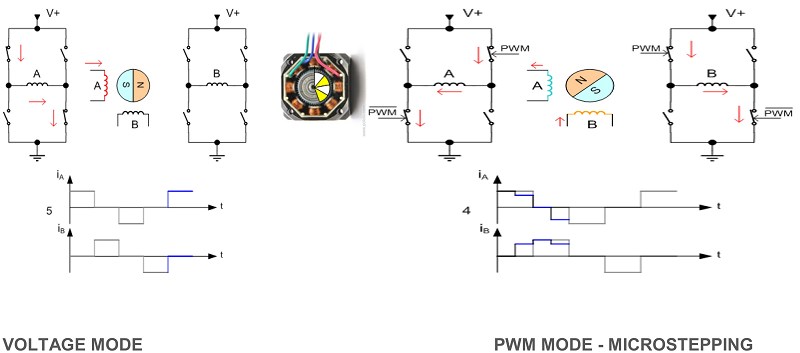
使用H橋控制2個馬達線圈中的電流—電壓模式。
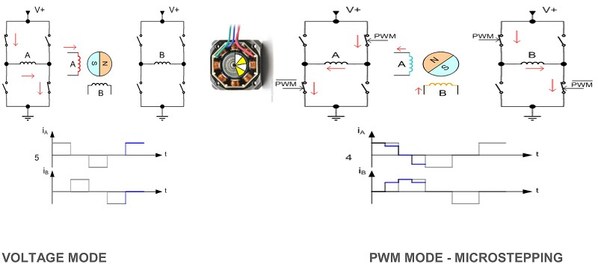
| 圖1 : VOLTAGE MODE 電壓模式(左);PWM MODE – MICROSTEPPING PWM模式—微步進(右) |
|
步進馬達驅動器必須取決於以下關鍵因素:
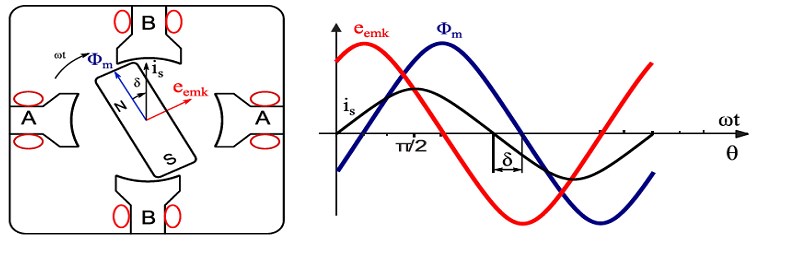
1.轉矩/轉矩效能—轉矩是繞軸旋轉物體的力。產生轉矩需要兩個元件—由永磁體產生的轉子磁場和由定子電流產生的定子磁場。當磁場方向相反時,轉矩最大—通過增加線圈電流,在-1/2或1/2處的轉矩將增加,當效能達到最大時,提供的最大轉矩等於負載。關鍵點—在穩定區域的邊緣提供最大轉矩,如果不注意驅動器邏輯,將造成馬達停止的風險。
2.負載角—負載角d是定子和轉子之間的角度。在產生的轉矩和負載之間是平衡的「p」。隨著負載增加,負載角d也會增加。
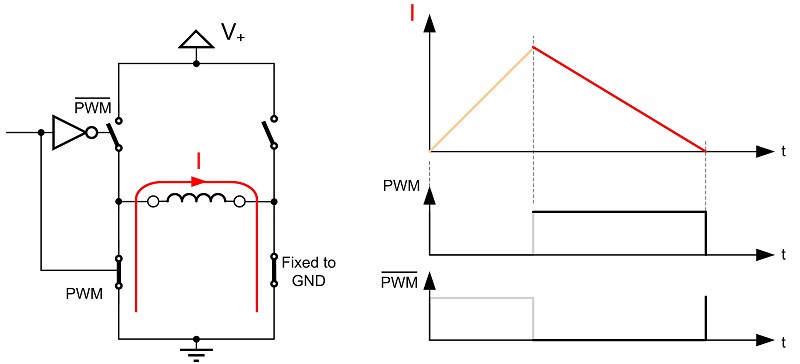
3.電流控制—通過使用脈寬調製(PWM)和切換H 橋,電壓將切斷馬達線圈和繞組。當電壓跨越線圈,電流將增加。當線圈短路,電流將減小,也被稱為「衰減」。
步進馬達驅動器和應用面臨的關鍵問題
隨著安全監控成為全球第一關注點, IP監控攝影機的使用在過去五年已翻兩番。隨著數位攝影機採用前端技術,最大的缺點是增加使用低成本的CMOS 和CCD圖像感測器。影音品質很大程度上取決於感測器解析度,當攝影機平移或傾斜時,「數位失真」即影音失真可清楚看到。最初解決問題是採用昂貴的類比馬達驅動器及基於軸編碼器品質的高解析度伺服回饋。使用這種驅動器非常昂貴,必須採用不同方案以提供影音品質,及降低成本和複雜度。
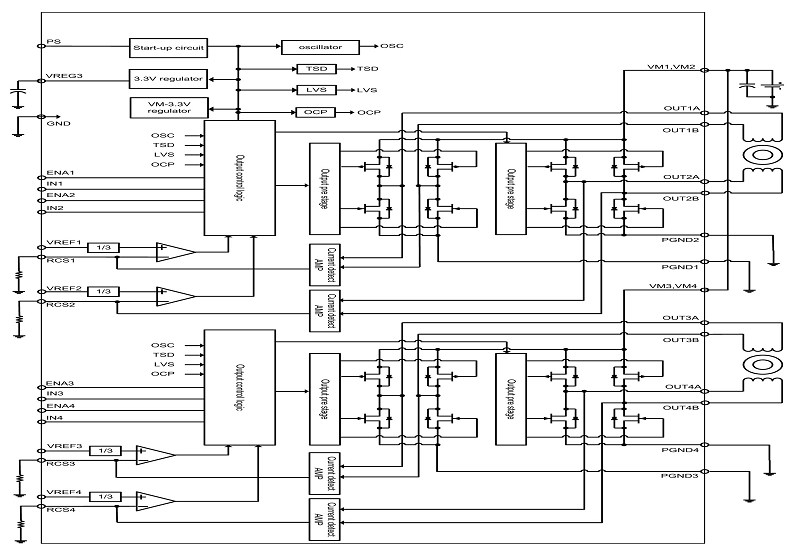
高度整合的雙通道PWM恒流控制步進馬達驅動器LV8714採用內置的全4路H橋切換電源和PWM邏輯驅動器,可驅動兩個步進馬達或4個直流有刷馬達。使用LV8714,任何設計人員可在數周內而不是數月完成從零到完整的PTZ監控攝影機的設計。由於參考輸入電壓用於每一H橋,LV8714可同時驅動兩臺馬達。寬輸入電壓範圍為4 – 16.5 V,適用於下列攝影機應用:乙太網供電的(PoE)監控攝影機、PoE銷售點終端、文檔掃描器、裝配線品質控制、平板掃描器和多功能印表機。
內置許多安全功能,如:步進馬達驅動器
1.單電源電壓以降低成本
2.由於內置低導通電阻的FET,提供高效能和更低能耗
3.內置電流檢測電阻以減少元件數和進一步降低功耗。較競爭元件降低35%的功耗
4.全面的安全設計提供過流和過熱關斷,無需使用外部元件
(本文作者Arthur Gonsky任職於安森美半導體)