現在的消費性產品愈來愈精細,其製程技術也愈來愈精細、繁複,與以往相比,運動控制設備也有了極大差異,現在的製程設備講究高速、多軸、高精度,因此對於程序控制與絕對同步有相當高的要求。
從技術來作區隔,運動控制可分為PLC Based與PC Based兩種架構,其中PLC Based仍佔多數市場,PC Based目前雖仍處於下風,不過由於具有高相容特性,往後發展值得期待,目前已有多家廠商設計出PC Based運動控制卡,提供完整解決方案,在高相容優勢下,這些PC Based運動控制卡的整合性相當高,例如這幾年技術也快速成熟的機器視覺,在與運動控制整合後,產生了1+1>2的附加效應。
運動控制軌跡需求
就目前來看,運動控制的軌跡控制需求,大約有幾項,第一是點對點的控制(Peer to Peer),這是最基礎的軌跡控制,只要利用運動控制卡控制單軸在兩點間的運動。第二種是補間運動,補間運動至少需由兩軸構成,形成一個多維或二維的運動軌跡,通常補間運動可以用於連續軌跡的運動控制,例如雕刻或是鞋模等等。補間運動的解析決定了軌跡運動的控制精度。第三種是多軸的同步運動,也就是控制兩個以上的運動軸做同時運動或同時停止。
同步運動控制進一步可以延伸出程序控制,透過運動控制卡的絕對同步性,使多軸的運動依照一定的時間順序準確控制,也通過條件設定使得軸與軸之間可以依據相互關係而運動,通常這種方式的控制必須採用串列式的運動控制器才能達成,由於串列式控制器與馬達驅動器有特定的通訊協議,彼此之間可以依據運作的時鐘,來實現絕對運動的控制。
程序控制技術有需求者,多為對即時性需求較大的產業,一般的無同步機制的控制卡,各軸之間的控制各為獨立關係。若要進行多軸互動,這種控制卡的精確度將會不足,必須使用串列式運動控制技術,讓各軸有依通訊協定依序動作,才能作到程序運動控制。
除串列式控制技術外,DSP的加入,則可讓使用者有更多的彈性加入到程序控制的流程。可程式化的優點讓使用者不需要通過作業系統的非即時性而造成指令延遲,可以充分利用串列式控制的即時性,而達到多軸同步控制的應用。
程序控制技術一覽
在程序控制中,用戶可以自由選擇各軸間的同步關係,例如決定了主軸運動之後,從軸可以依據主軸的位置、運動速度、或是外部的數位信號作為同步觸發信號,也可以實現動態位置補償的功能,使得主從軸可以在時間上完美搭配。程序控制的控制權在DSP上,所以可以大幅減少CPU的系統負擔,減少通過作業系統傳遞運動指令所造成的時間延遲,增進往復性的控制效能。目前運動控制有幾種作法,以下從幾種作法來看這些技術在程序運動控制方面的狀況。
首先是ASIC(特殊應用IC),ASIC-based的運動控制一般適合用於步進馬達、線性馬達及伺服馬達等非同步運動軌跡控制。ASIC是指針對單一應用而設計的積體電路,部份控制器會採用特殊設計的運動功能IC,進行各種運動控制,由於ASIC經晶片開發廠商經過一連串測試與市場洗煉,因此穩定度與功能的驗證度高,整體的指令集執行速度快。不過ASIC缺乏可程式化能力,所以並沒有擴充能力,也無法實現絕對同步的運動控制。
第二種是DSP-based,DSP(Digital Signal Processor;數位訊號處理器),將程序做即時處理,像是音響效果與雜音去除之資料處理與控制,對依序輸入的數位訊號,都會要求即時處理。
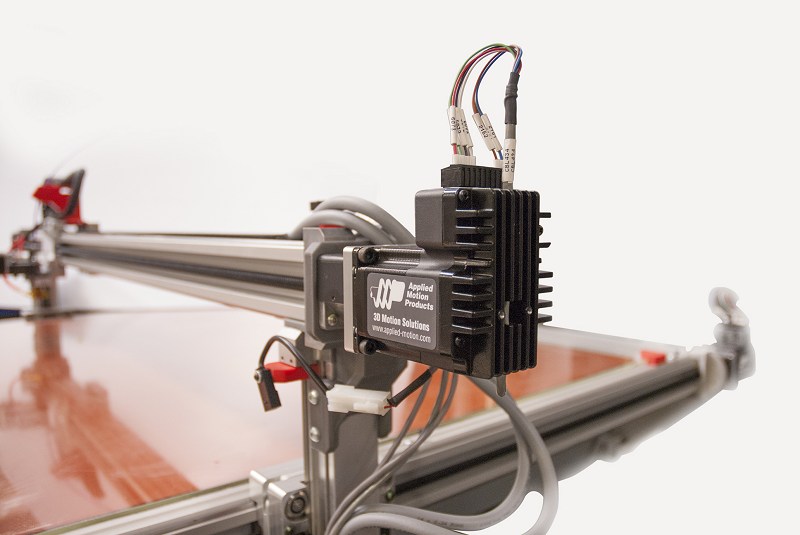
| 圖1 : 運動控制不但講究即時與精準,同時對於動作之間的往返週期,也必須盡可能縮短。(Source:3DP) |
|
由於DSP具有即時運算的功能,而近年來伺服控制也開始出現即時性的需求。在精準時間控制的要求下,一般都採用速度較快的DSP,也有採用RISC或是一般CPU來完成的。使用高速的DSP通常會搭配高速記憶體,而採用DSP的運動控制卡,由於具有可程式化的能力,所以一般使用者可以下載部分程序控制碼在DSP內部執行,這樣的優點在於整個控制程式享有即時性的特點。
第三是串列控制技術,一般而言,串列式控制具有自己的通訊協定,使得控制器與被控制端可以依通信協定進行資料交換,以作為運動控制或是取得相關伺服資訊回到控制器端,其通訊也會依固定時間做資料交換及更新動作,也就是會依據即時性的特性來運作。
即時與精細度的需求
上述三種技術,都可用來作程序運動控制,不過在複雜的機構系統與控制中,機構與時間的配合十分重要,能否達到可容許值的時間差,甚或無延遲動作連結,端視設計功力。例如在一台手機製造自動化設備中,機器手臂要將晶片拿起,這樣一個簡單動作,就必須應用多軸的同步與程序控制,先是頂針必須對準晶片,然後在與機器手臂同步的時間內將晶片頂起以利於吸頭的抓取,這簡單的兩個動作,必須依賴運動控制卡的程式運動控制技術才能完成。
而這連串的動作,必須通過PC將使用者的運動控制指令傳達到運動控制卡上,傳遞過程中若是作業系統的時間延遲無法即時,多軸之間的同步性將會被破壞,造成錯誤動作。因此,程式運動控制中,使用者要進行同步運動控制,必須先編好程式碼後,將之下載到DSP中做運算,DSP會依據串列式運動的資料更新週期時間,完成程序控制。
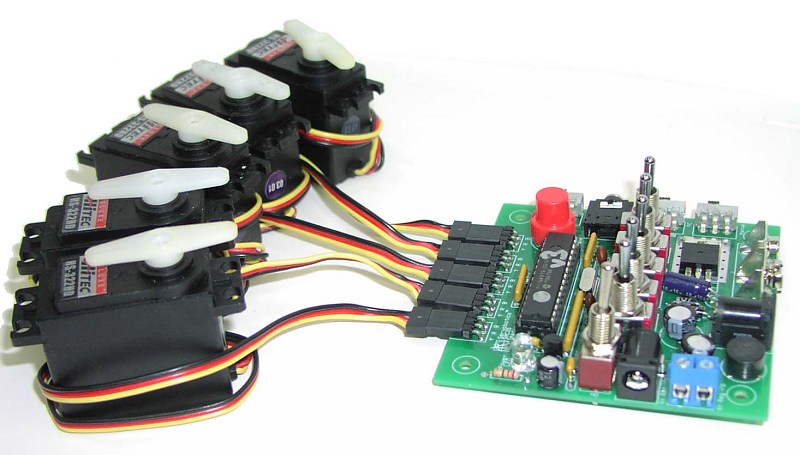
| 圖2 : 同步運動控制進一步可以延伸出程序控制,透過運動控制卡的絕對同步性,使多軸的運動依照一定的時間順序準確控制。(Source:Images) |
|
現在各種產品精細度要求愈來愈高,對製程要求也愈來愈嚴苛,而運動控制不但講究即時與精準,同時對於動作之間的往返週期,也必須盡可能縮短。簡單來說,就是整體運動控制路徑,必須達到最佳化;要達到最佳化,就得整合各種相關技術。如通訊技術,這樣的整合被視為難度最高的控制技術,目前台灣多數廠商的技術水準已能追上國際大廠,未來發展值得期待。
**刊頭來源:(Source: Prodrive-Technologies)