想像一下,利用微創切口來進行重大外科手術,就能大大減輕疼痛,縮短住院時間,讓病人更快恢復日常活動,並可獲得更佳的臨床效果。但直到最近,可用的外科手術方式還是非常有限的,一般只能採用大型切口的傳統開放式手術或是腹腔鏡手術,這也就是一種利用光源導管通過小型切口進行的手術。然而,儘管腹腔鏡手術是一種侵入性極低的手術,但由於儀器因素,通常只能用來進行非常簡單的步驟。受益於技術的突破,如今出現了另一種利用機器人輔助的微創手術。
這些手術系統結合了電腦和機器人技術,能用來實現機器人輔助腹腔鏡、胸腔鏡或內視鏡手術。透過為外科醫生提供這些強化功能,微創手術將能以比傳統外科方法更佳的視覺化效果、精密度、靈敏度和控制來處理更多的情況。
微創機器人輔助手術的應用廣泛,從心臟手術到癌症手術都能適用,可以治療多種病症,例如前列腺癌、子宮內膜癌、病態型肥胖和二尖瓣回流等。這些系統以創新方式將機器人與外科技術結合在一起,讓外科醫生能為各種複雜病症的病人提供最有效、侵入性最低的治療方式。
該設備的典型設置包括手術臺以及病人推車,推車上安裝了互動式機器人手臂和一台可觀看身體內部的高倍數3D影像監視器。造影和影像引導技術可為外科醫生提供有關重要身體內部結構和儀器位置的準確三維資訊。
進行手術時,外科醫生會利用像鉗子一樣的主控設備來操作。當外科醫生操作控制台時,系統會對輸入產生即時反應,並將醫生的手部、腕部和手指動作轉換成微型設備的精密動作。圖1所示為機器人手術系統的照片。
這類系統通常採用分散式電源架構設計。因此,它是以AC電源線供電,可能是110VAC 或220VAC,然後轉換到能為48V電池組充電的隔離式48V DC電壓。48V匯流排電壓會流過整個系統,以對所有子系統的負載穩壓器的下行點供電,包括機器人手臂、系統電子、儀器和高畫質顯示。當AC主電源斷電時,電池組可用來維持系統的運行。然而,根據電池充電的狀態,電池組電壓可能會高於、低於或等於48V輸入,因而,要為此應用設計電源已成為一個挑戰。幸運的是,凌力爾特最近推出了LT8705元件,這是一款80V 同步升降壓控制器,可解決此類電源需求問題。
新的設計方法
LT8705是效率非常高 (高達 98%) 的同步升降壓DC/DC控制器,輸入電壓能夠以高於、低於或等於穩壓的輸出電壓運行。該元件有四個可調節輸入電流 / 電壓以及輸出電流 / 電壓的回饋迴路。輸出電流迴路可為電池充電器提供已調輸出電流,或作為電流源。透過使用具備 4 開關同步整流的單一電感器,LT8705能在2.8V至80V的寬廣輸入電壓範圍內運行,並產生一個1.3V至80V的輸出。單一元件最高可提供250W的輸出功率。若將多個電路並聯,還能實現更高的輸出功率。
其他的特性還包括:能夠顯示哪個回授迴路在啟用的伺服針腳、為外部元件供電的 3.3V/12mA LDO、可調整的軟啟動、內建的晶片溫度監測器,以及攝氏-40度至125度 的工作接面溫度範圍。LT8705具有38接腳、5mm x 7mm QNF,以及38接腳TSSOP 兩種封裝形式。同時,也可提供LT8705的LTspice電路模型,能容易地評估各種創新應用。
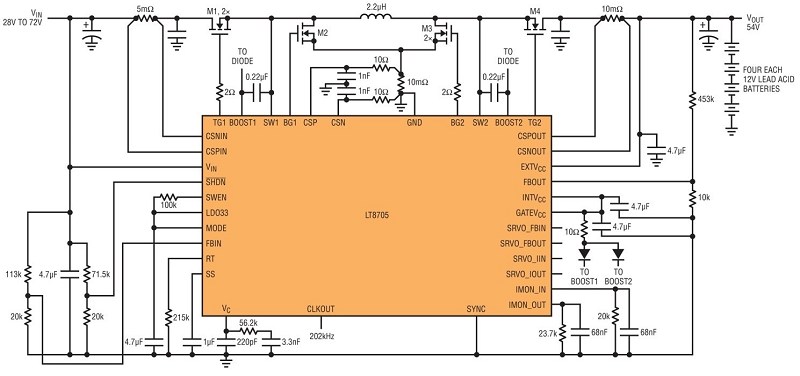
LT8705包含四個誤差放大器,能用來調節或限制輸出電流、輸入電流、輸入電壓和輸出電壓。在典型的應用中,通常會調節輸出電壓,其餘的誤差放大器則是用來監控過高的輸入或輸出電流,或是輸入欠壓的情況。在電池充電器等其他應用中,輸出電流調節器能促進恒定的電流充電,直到達到預先設定的電壓值為止,這時輸出電壓控制便會接管任務。在圖2顯示的電路圖中,此LT8705電路是用來為一個48V電池充電,並能在從36V至 72V之間變化的輸入電壓範圍運行。把多個電路並聯在一起,便能用於更高功率的應用。電路中有4個外部MOSFET,能使此電路作為同步升降壓轉換器,並透過配置成為能為 4個串聯12V鉛酸電池充電之電流源。
電源開關控制
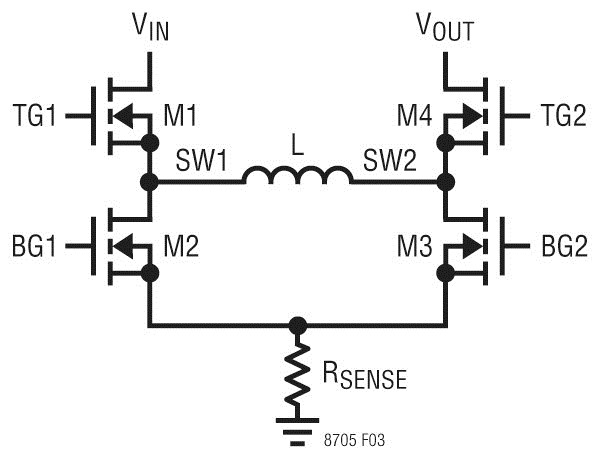
圖3為簡化的示意圖,其說明了如何將4個電源開關連接至電感、VIN, VOUT 和地端。
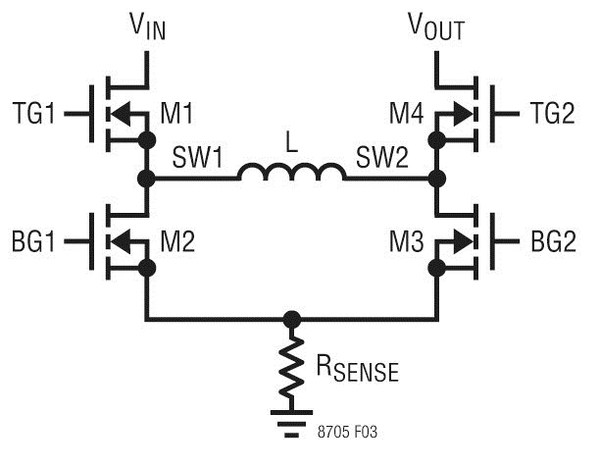
| 圖3 : 由 LT8705 驅動 4 個 MOSFET 開關的簡化示意圖 |
|
當VIN 明顯高於VOUT 時,該元件將運作於降壓模式。在此區域中,M3始終關斷而M4 始終導通,除非在Burst Mode操作或不連續模式中檢測到反向電流。在每個週期的起點,同步開關M2首先導通,而電感器電流由一個內部放大器來檢測。一個斜率補償斜坡訊號被加至檢測電壓,接著與一個基準電壓進行比較。在檢測到的電感電流降至基準以下之後,開關M2關斷,而 M1 (同步整流器) 則在此週期的剩餘時間裡導通。開關M1和 M2將交替導通和關斷,其作用類似於一個典型的同步降壓穩壓器。
當VIN和VOUT彼此靠近時,工作週期將減小,直至達到轉換器在降壓模式中的最小工作週期為止,該元件隨後進入升降壓區,而且所有4個MOSFET將執行開關操作。
當VOUT明顯高於VIN時,該元件將運行在升壓模式。在此區域中,M1始終導通,而開關 M2則始終關斷。在每個週期的起點,開關M3首先導通,而電感電流由一個內部放大器來檢測。在檢測到的電感電流升至高於基準電壓之後,開關M3關斷,而開關M4則在此週期的剩餘時間裡導通。開關M3和M4將交替導通和關斷,其作用類似於一個典型的同步升壓穩壓器。
故障情況
在某些工作條件下,LT8705將啟動一個故障序列。如果出現任何此類情況(例如:過流或者過壓狀況),則內部開關操作和時脈輸出被停用。與此同時,一個超時序列開始,此時需要重啟軟啟動功能。倘若故障持續存在(比如在過流期間),將不允許軟啟動功能重新啟動轉換器。在故障情況已被消除且一個預先規定的超時週期結束之後,轉換器將重新開機,而重新開機的速率取決於分配給LT8705之軟啟動引腳的電容器數值。超時週期可減小器件及其他下游功率元件所承受的電應力和熱應力。
總結
機器人手術系統能被用來進行多種重大的微創手術,以幫助病人縮短住院時間,更快恢復正常行動,並取得更佳的臨床效果。如果採用分散式電源架構來為此類系統供電,則允許使用一個負責給用於所有子系統的下游負載點穩壓器供電的48V標稱電池後備匯流排電壓。由於其可利用一個可以高於、低於或等於輸入電壓的浮動電壓對電池進行高效充電,因此凌力爾特的 LT8705同步升降壓 DC/DC控制器可大幅簡化電源設計。
(本文作者Bruce Haug 任職於凌力爾特資深產品行銷工程師)