相較於過去傳統汽車將人安全的從甲地送到乙地,現在的汽車除了做到這樣的要求之外,衍生出其他額外的需求,如感知、判斷、控制、自我學習等。當汽車加入各種感測器、電子系統、資通娛樂等功能後,已經邁向更加智慧化的發展。
「現在的車子已經越來越聰明,」華創車電技術中心資深經理陳正夫說,過去汽車如有狀況,就只能停在路邊等待救援,現在的汽車因能夠自我診斷、控制,當遇到問題時,能夠做適當的操作,以安全的速度行駛至附近的維修廠。
隨著科技不斷進步,如今汽車已不再只是機械傳統系統,而是一台及其複雜的電子產品,陳正夫指出,現在較先進的汽車,大約有40%的成本在電機電子上,並且這些電機電子將會越來越多。也因為如此,汽車技術研發已不再只侷限在傳統汽車大廠身上,就連Google這樣的科技大廠也要進來分食一杯羹,例如打造無人駕駛汽車。
Google無人駕駛進展迅速,目前已在美國的街道上進行試駕,截至2012年8月為止,已經行駛超過300,000英哩(大約48萬公里),除了因人為介入的因素之外,沒有發生任何事故,Google共同創辦人Sergey Brin曾宣佈,將在5年內推出無人駕駛汽車。
安全駕駛為首要目的
根據工研院的定義,智慧車輛發展目標簡而言之就是安全、舒適、與環保節能,然後才是更進一步的自動駕駛,這也是國際智慧車輛技術發展的共同目標。概念簡單,但其中牽涉到許多技術。
安全,是汽車駕駛最基本的要求,隨著駕駛輔助系統、碰撞預警系統、防碰撞系統、盲點警告等主動安全系統更加普遍,汽車可以警告或甚至介入駕駛的操作,作更安全的控制。要做到這些動作,車子對於周遭環境的感知顯得更為重要。
環境感知有多種不同的方法,例如汽車中的車前環境偵測系統中通常會透過雷達偵測物件、判斷距離,再經由影像處理判斷物件特性,進行警示或者剎車控制,根據距離不同,所使用的工具也不一樣,可分為長距、中距及短距。例如車裡常用的行車紀錄器,為廣角鏡頭,可看範圍較大,通常用在短距離;夜視系統可看角度小,但距離遠,可達一百公尺外的距離,因此用在長距監測。此外,汽車周圍也有超音波、雷射、攝影機等可以感知周遭環境,讓汽車安全大幅提升。
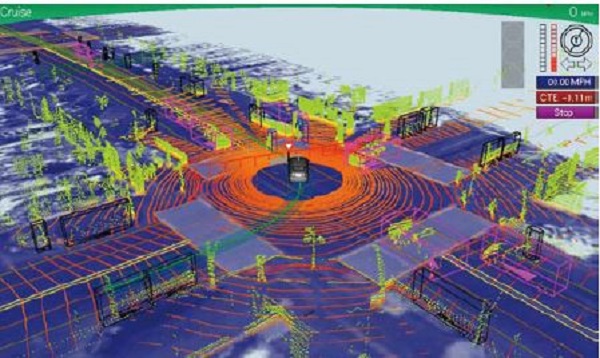
陳正夫舉例,Volvo用了十幾個雷射來掃描,加上十個以上的攝影機遍佈車身,可偵測出路口、障礙物等路況,收集了汽車前後左右、大小角度、不同距離等資訊,藉此做出判斷與控制,最後成為無人駕駛汽車。
「智慧汽車是多種專長的組合,」陳正夫表示,就像人的五官可以感知環境變化,未來的汽車更將會有更類人的感官、思維,透過感測器、攝影機、雷達、雷射等工具,偵測週遭環境,作出相當程度的判斷與控制,如提出警告或甚至限速,讓駕駛能夠有更安全、更舒適的體驗;同時也能自我診斷,掌控車子自身狀況,並且透過自我學習,自動調整如零件老化、磨耗等參數。
會”說話”的汽車 提升駕駛安全性
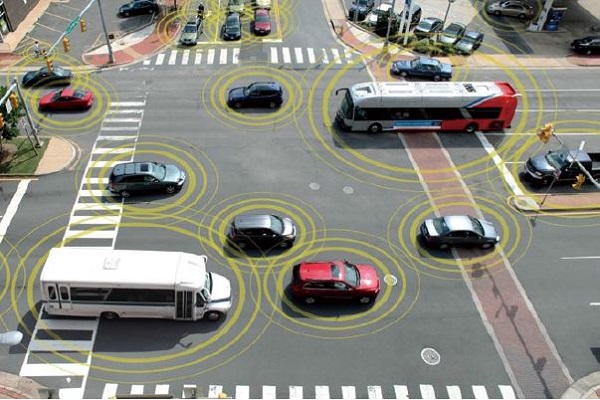
除了汽車本身的判斷、控制以及感測週遭環境外,與外在環境訊息溝通的車外安全系統也是智慧汽車發展的目標之一。未來的汽車不只能透過3G、4G網路連線或其他方式獲得附近環境的即時資訊、做即時的動態路徑規劃,車子之間也能夠互相「說話」,這將會增加許多可預測性資料。
外來資訊的取得,一般較常用的為導航系統。導航系統除了有GPS衛星導航技術外,也內建一些交通規則,如速限警告。然而,部分資訊沒有辦法及時更新,或者某些路段根據不同時間而有不同的速限,這些規則是導航系統沒有辦法做到,因此還必須仰賴攝影機、雷達或者透過網路連線,才能夠有較為彈性的依據。為此,歐盟也計畫在明年統一歐洲所有限速標誌,讓汽車能夠更為容易的偵測,不僅交通便得更加順暢,駕駛對於環境也更有掌握度。
而更進一步的,是汽車之間的互相通訊。IEEE智慧系統研究教授Azim Eskandarian表示,當多輛汽車開始互相溝通,若前方有事故發生,後方的汽車能夠即時地警覺,且有較多的反應時間。「你不用知道其他汽車的ID,但卻可以知道每輛車的相對位置,」陳正夫說,如此一來,可增加更多的可預測性資料。這一點也是Google無人駕駛的目標之一:車與車之間的連結,藉此提升駕駛的安全性。
無人駕駛漫漫長路
這樣看來,只要有感測器、網路等工具,掌握詳細路況資料,要做到無人駕駛似乎不難。屆時,駕駛要做的事情就是放輕鬆的坐在座位上,然後享受整個旅程。根據IEEE預測,2040年路上將會有75%的汽車是無人駕駛。
然而,無人駕駛其實已不是什麼新鮮技術,2009年汽車大廠寶馬做已經做出無人駕駛車輛,並且曾環繞德國紐伯格林行駛,但至今無人駕駛車輛大多仍只是在測試階段,不能真正上市。對此,陳正夫指出,要將這些技術模擬到跟人類感官一樣,始終還差一點。
雖然汽車已可以提供多種資訊,但是對於介入操作及控制,甚至是無人駕駛,目前礙於技術,仍然有許多的變數。Google無人駕駛專案負責人Chris Urmson就曾在他的部落格中寫出,無人駕駛汽車目前還存在一些挑戰,例如辨識被雪覆蓋的道路、臨時道路施工或辨別人工指揮等。
這也是為什麼,Toyota、Audi等汽車大廠不將他們所研發的自動駕駛定義為無人駕駛汽車。Toyota的Lexus LS配備GPS、立體攝影機、光線偵測雷達、雷射追蹤等裝置,並且可以提醒駕駛交通號誌變換,他們強調這些功能是以"副駕駛"的角度來協助司機監控道路,並協助停車或達到其他自動安全功能,並非取代成為駕駛。
Toyota認為,自動駕駛只是研究的其中一部份,他們最終的目標是配備一個智慧系統,建立起共同駕駛的機制,讓人們可以安全駕駛。另一方面,在Audi的Piloted driving計畫中,也是以駕駛輔助系統的概念,協助駕駛開車,提升安全並減輕駕駛負擔,而非無人駕駛。
不過儘管無人駕駛還有技術上的瓶頸,但不代表智慧汽車不可行。毫無疑問的,當運算能力越來越強大、通信技術的進步,汽車中的電子系統越來越普及,並且改變人們的駕駛體驗,也讓智慧車輛藉著和外界的資訊服務能夠與周遭環境做最佳的配合,發揮最佳的效能。