無刷直流 (Brushless Direct Current)馬達目前在市場的接受度越來越高,使用也越來越普遍,BLDC馬達應用在例如工業自動化設備、消費性、醫療、車用電子、航太以及儀器等產業中,BLDC馬達並不使用電刷來進行換向動作,而是利用電氣控制的方式。
BLDC馬達的轉子主要由2、3或4個極性對組合的永磁式磁鐵所構成,定子則由採星狀連接的繞線線圈組成,換向動作主要透過控制電流流經適當定子的相位線圈來產生轉矩輸出,無刷直流馬達的換向動作由轉子的位置決定,因此,必須要在馬達的軸心加入一個回授元件來將目前轉子的位置提供給控制器。
在各種不同型式的回授元件中,磁性霍爾效應感測器和光學換向編碼器是目前產業中較常採用的感應元件,不過這些編碼器卻存在部分限制與缺點,霍爾效應感測器可以偵測換向磁鐵的移動,光學換向編碼器則可感測編碼輪的動作,換向磁鐵極性對以及編碼輪的軌跡樣式為固定,並與BLDC轉子極性對匹配,但這卻造成終端使用者必須針對不同極性對的BLDC馬達進行匹配時,在換向磁鐵或編碼輪樣式組態上的困擾。
絕對編碼器透過將絕對計數值送回,並與事先在控制器中所規劃的計數數值比較,啟動正確的換向程序解決了這個問題,此外,絕對編碼器同時也可以通過提供其他功能,例如可以用來做為伺服定位以及在電源啟動時記住關閉前最後位置的增量式通道信號帶來更多的附加價值,藉由絕對編碼器的多項功能,將能夠有效降低整體BLDC系統的成本。
無刷直流馬達 6步換向動作概念的介紹
無刷直流馬達通常包含定子繞線線圈,安排方式則由以永磁式磁鐵所組成的轉子極性對來決定。
在無刷直流馬達中,換向順序在轉子旋轉上扮演了相當重要的角色,每個換向動作都由一個電流流入定子線圈的正極,搭配另一個電流流出線圈的負極,而第三個處於不通電狀態的情況所構成。
轉矩則由定子線圈和永磁式磁鐵所產生磁場間的交互動作產生,理想上最大轉矩會發生在這兩個磁場90o交叉時,最小則在磁場方向相同的情況下。
為了讓馬達運轉,由繞線線圈所產生的磁場必須在轉子動作追上定子磁場時改變位置,也就是說,控制電流流入6個方向的適當馬達相位線圈以取得輸出轉矩的過程就稱為6步換向。
霍爾效應感測器與光學換向編碼器在BLDC馬達換向順序中扮演的角色
換向回授元件將目前轉子位置資訊以U、V、W信號形式提供給控制單元,這些回授元件同時也可能將其他資訊,例如速度、加速度、轉向、轉動次數等送到控制單元。
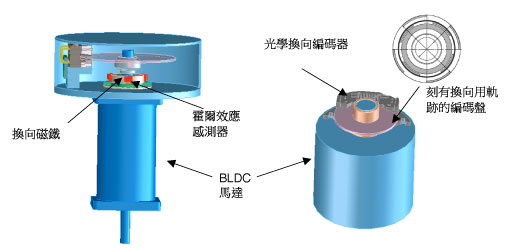
| 《圖一 霍爾效應感測器與光學換向編碼器可以用來偵測目前轉子的位置。》 |
|
霍爾效應感測器是目前使用最廣泛的元件,這個相當具有成本效益的感測系統在1970年代後期推出後目前已經相當成熟,最近一個較新的替代選擇則是光學換向編碼器,這個編碼器可以產生精確的角度編碼信號,通常應用在需要更高解析度的場合,這代表了編碼盤的換向軌跡必須對準轉子的位置。
磁性霍爾效應感測器以及光學換向編碼器是目前產業中較受歡迎的回授元件,不過這些編碼器也存在一些限制與缺點。
霍爾效應感測器可以偵測換向磁鐵的移動,光學換向編碼器則可感測編碼輪的動作,換向磁鐵極性對以及編碼輪的軌跡樣式為固定,並與BLDC轉子極性對匹配,但這卻造成終端使用者必須針對不同極性對的BLDC馬達進行匹配時,在換向磁鐵或編碼輪樣式組態上的困擾。
採用絕對編碼器讓BLDC馬達轉向可以與任何轉子極性對搭配
(圖二)為包含目前轉子位置資訊,可以用來進行兩極性對BLDC馬達換向動作的U、V、W波形規格,從波形中可以看到每30度機械角,U、V或W波形會在邏輯狀態上變化,以U、V、W碼為基礎,可以在每30度啟動適當的定子繞線線圈,這代表了在一個完整的轉子軸心運轉中總共會有12個換向程序。(表一)提供了不同轉子極性對的其他可能換向程序組合。
| 《圖二 兩個極性對(4極性)的U、V、W波形規格。》 |
|
(表一) 轉子極性對相對於換向狀態的列表。
極性對 |
每轉不同狀態數 |
狀態寬
( 機械角 ) |
每狀態寬 16-Bit絕對編碼器計數值
( 計數數 ) |
2 |
12 |
30 |
5461 |
3 |
18 |
20 |
3640 |
4 |
24 |
15 |
2730 |
轉子回授資訊也可以透過使用絕對編碼器來取得,在絕對編碼器系列產品中,16bit絕對編碼器是業界相當普遍採用的產品,每轉可以產生達216 = 65536個絕對計數值。
在搭配BLDC馬達系統使用時,第一個步驟就是要將絕對計數值0與BLDC的轉子對準,這個對準動作可以透過啟動任何兩個定子相位將BLDC馬達的軸心位置固定來進行,接著將絕對編碼器的編碼盤緩慢轉動直到絕對編碼器的輸出值為0,這時編碼盤就可以鎖定軸心。
以兩極性對BLDC馬達的狀態寬(30度機械角)為基礎,計數增量值5461預先儲存在控制器中,在運轉時,控制器會追蹤最新轉向動作後的5461個計數值以進行下一次的定子繞線線圈換向動作。
透過將預先設定的計數值改變為3640,那麼絕對編碼器就可以搭配三極性對的BLDC馬達使用,這樣做將可以取得絕對編碼器能夠與任何極性對BLDC馬達匹配的大幅優勢。
結論
在各種不同型式的回授元件中,磁性霍爾效應感測器和光學換向編碼器是目前產業中較常採用的感應元件,不過這些編碼器卻存在部分限制與缺點,霍爾效應感測器可以偵測換向磁鐵的移動,光學換向編碼器則可感測編碼輪的動作,換向磁鐵極性對以及編碼輪的軌跡樣式為固定,並與BLDC轉子極性對匹配,但這卻造成終端使用者必須針對不同極性對的BLDC馬達進行匹配時,在換向磁鐵或編碼輪樣式組態上的困擾。
絕對編碼器透過將絕對計數值送回,並與事先在控制器中所規劃的計數數值比較,啟動正確的換向程序解決了這個問題,此外,絕對編碼器同時也可以通過提供其他功能,例如可以用來做為伺服定位以及在電源啟動時記住關閉前最後位置的增量式通道信號帶來更多的附加價值,藉由絕對編碼器的多項功能,將能夠有效降低整體BLDC系統的成本。
(作者任職安華高(Avago)科技運動控制產品事業部)