隨著自動化的周邊技術進步,小型掃地機器人的導航方式也不斷提升。而機器人的航位推測法,就是最新的關鍵技術。在導航中,航位推測法是從已知的起始位置開始,搭配隨時間改變的內部速度和前進方向估算,來估測出一個位置,其中不需要任何外部參照物。用於機器人航位推測法的典型感測器包括用滾輪旋轉來估算速度的滾輪編碼器、根據觀察到的地板樣式來估計速度的光流感測器 (類似電腦滑鼠中使用的感測器),以及測量面向位置和加速的 IMU。航位推測法是由這些感測器提供的綜合資訊所計算而成。

| 圖一 : 小型掃地機器人的導航方式也不斷提升,而機器人的航位推測法,就是最新的關鍵技術。 |
|
這些航位推測法的運算法已實際應用在機器人中,並且逐漸超越知名的隨機漫步 (在地板上以看似隨機模式移動的機器人)。這些機器人會運用智慧漫步,這是一種更先進的清潔方法,即利用航位推測法依照經計算的模式移動。航位推測法是它們導航資訊的主要來源,也能讓這些機器人更有效地清潔表面,並節省電池壽命。對消費者而言,它能有效清潔以節省時間;對於 OEM 廠商,它不需要 LIDAR 或昂貴的相機 (在 VLAM 系統中),進而節省 BOM 成本。
即使是在更先進的 VSLAM 和 LIDAR 系統中,航位推測法依然佔有關鍵地位。VSLAM 式解決方案仰賴相機來計算機器人的位置。相機通常指向前方或上方的角度,找出各種邊緣或物件來定位其位置。但是,如果機器人進入光線不足的區域 (如床底或沙發下),就會失去可利用的視覺線索,因而迷路。進入沒有特別裝飾的房間 (譬如四面皆是白色牆面) 也會發生同樣的狀況。當機器人越過門檻或參差不齊表面時,LIDAR 系統會遺失資訊,創造出同樣不均勻的世界。航位推測法填補這些關鍵時刻的定位空白資訊,並維持正確的路線。
各感測器的用途與挑戰
航位推測法似乎可以透過自動化導覽解決許多問題,這點毫無疑問,但航位推測法本身並非沒有難題待解決。隨著時間流逝,由於內部估計誤差 (速度和面向位置),透過航位推測法計算出的位置將偏離真實位置。每個感測器都會有影響輸出準確性的自身狀況。
滾輪編碼器雖然可以追蹤滾輪的旋轉狀況 (以輪軸為中心移動的距離或速度),並直接轉化為線性位移。但這是最理想的狀況。在現實世界中,滾輪可能會因為軟質表面和地表變化而滑移或打滑。在這些滑移或打滑期間,滾輪會比機器人移動得更遠或更近。滾輪編碼器的讀數會準確反映滾輪的行為,但那並非機器人的確切位置。
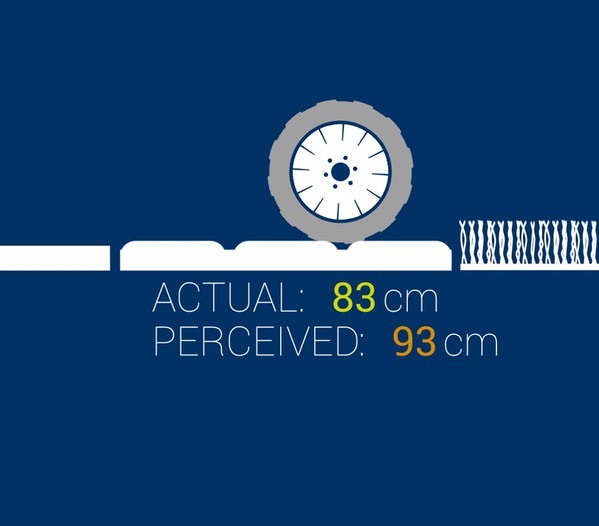
| 圖二 : 實際數目:83cm ; 被察覺的數目: 93 cm |
|
光流感測器是可以在電腦滑鼠中找到的感測器。光流感測器使用LED 或雷射光來查看其影像中的相對變化。如果影像中有特定的子像素組一起移動 (或流動),它會提供感測器整體移動方向的資訊。您的電腦滑鼠幾乎都會在平坦光滑的表面上使用,因此其狀況和輸出結果可達到穩定一致。但機器人會在不同的地板上移動,根據地板與感測器之間的高度差異及感測器的類型,提供不同的資訊。某些地板搭配 LED(較粗糙)的運作效果較佳,其他則是搭配雷射(較平坦)的效果較佳。為了讓機器人從光流感測器取得最佳資訊,校正感測器以配合地面高度和地板種類可說是至關重要。
| 圖三 : 慣性量測單元(IMU)會測量加速度和角速度,並轉換為前進方向和傾斜資訊。 |
|
慣性量測單元(IMU)是正如其名專門設計的感測器。它們會測量加速度和角速度,並轉換為前進方向和傾斜資訊。我在前一篇文章提到,面向位置的準確性對機器人來說很重要,因為這樣才能找出前進的方向。傾斜資訊有助於防止機器人往牆面上爬,或因為椅子太高而卡住。IMU 對感測器一致性方面有其挑戰。它們會受到溫度影響,需要校準才能正確使用。
結合一切要素
為了建立精確的航位推測演算法,每個感測器都必須經過校準,以提供精確的資訊。這項工作本身就有其難度,而要讓這些感測器互相融合更增添了複雜程度。藉由比較滾輪編碼器資訊和 IMU 和光流感測器,可偵測到滑移和打滑的情況並忽略相關資訊。同理,光流法也可以透過比較其流向與滾輪編碼器預期的線性動作來進行動態校準。利用 IMU 來檢查在平滑表面上的一致性,可提高對測量的信心程度。除了持續監控溫度對於性能的影響,這也能維持對感測器的掌控。感測器融合的價值在於隨時瞭解哪些感測器資訊最值得信賴,藉此盡量展現最佳成效。如您所見,儘管我還未全部列舉出來,但航位推測法的程序已包含許多複雜議題。
航位推測法是強大的工具,可用於任何地面模式的機器人,比起進階的 VSLAM 或 LIDAR 系統更能展現高效率。它可以利用智慧漫步縮短清潔時間,也可以在不良的環境之下,為複雜的 SLAM 演算法增加韌性。精心結合滾輪編碼器、光流感測器和 IMU 來實現航位推測法。
當您發現在地板上看似簡單的清掃模式竟是如此複雜程序的成果,可能會大吃一驚,但所看到這些流暢的成果,正是許多感測器和感測器融合所實現的心血結晶。在此情況下,至少總體是大於個體的總和。
(本文作者Charles Pao為CEVA 感測器整合事業單位資深行銷專員)