目前Microchip 的3.3V 70MIPS dsPIC33EP MC 系列是专门针对motor control所设计的MCU/DSP。以三相马达控制为例,从基本的BLDC 六步方波到Sensorless FOC (PMSM永磁同步 or AC感应)皆可轻松应付。若强调车用及安全功能,5V 且具有ECC (error codes correction)的dsPIC33EV系列则为首选。而PIC32MK MC 系列及SAM E/S7x 300MHz Cortex M7系列则非常适合高阶伺服马达控制应用,如高速高精度的工具机台。以下介绍会以较常见的三相永磁马达为主。
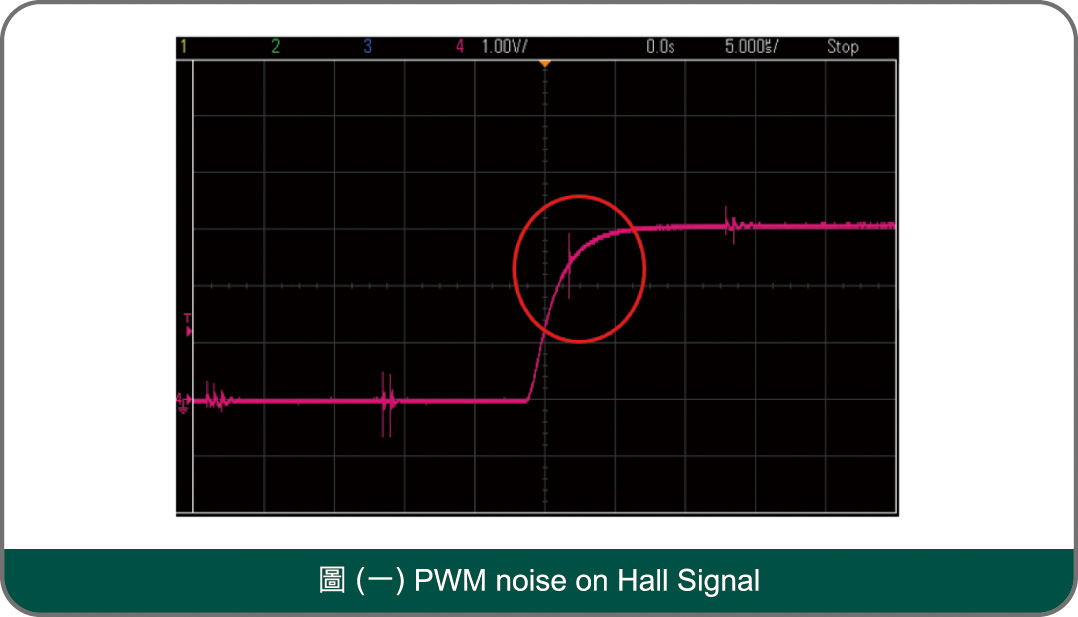
以控制法则来分,有BLDC六步方波驱动,可以是开回路或是速度闭环或速度及电流闭环控制。若要输出弦波有Sensorless FOC (Microchip Application notes AN1078, AN1292) 或开回路弦波控制(AN1017)。若要输出弦波电流,且马达启动时就有高负载,sensor-less FOC就比较不适合。此情形就必须在马达加上Hall IC 或编码器侦测马达转子位置,以便在马达堵转时也可输出高扭力,例如e-bike, e-scooter等。一般来说都会使用Hall IC。但根据经验,我们常遇到弦波控制时,Hall IC输出容易受马达动力线或PWM干扰,尤其是Hall 信号线常与motor UVW动力线做成同一条线时此情形更为常见,如图(一)红色圈所示,其中的noise会导致MCU多产生一次以上之Capture中断,如果是以中断读取Hall 信号来计算速度,此情况便会造成速度计算突波。
...
...
| 另一名雇主 |
限られたニュース |
文章閱讀限制 |
出版品優惠 |
| 一般訪客 |
10/ごとに 30 日間 |
5//ごとに 30 日間 |
付费下载 |
| VIP会员 |
无限制 |
20/ごとに 30 日間 |
付费下载 |